第 17 章 · 4000 万行一招写完 · 链接自动初始化
配套代码:oop-in-c/code/17-initcall/
ch16 给你看了 Linux 内核 GPIO 子系统的骨架:ops 表 + 多态 dispatch。但有一件事 ch16 没解释,几千个驱动是怎么注册到 gpiolib 的?
不是手写一长串 vendor_a_probe(); vendor_b_probe(); vendor_c_probe(); ... 在 start_kernel 里。
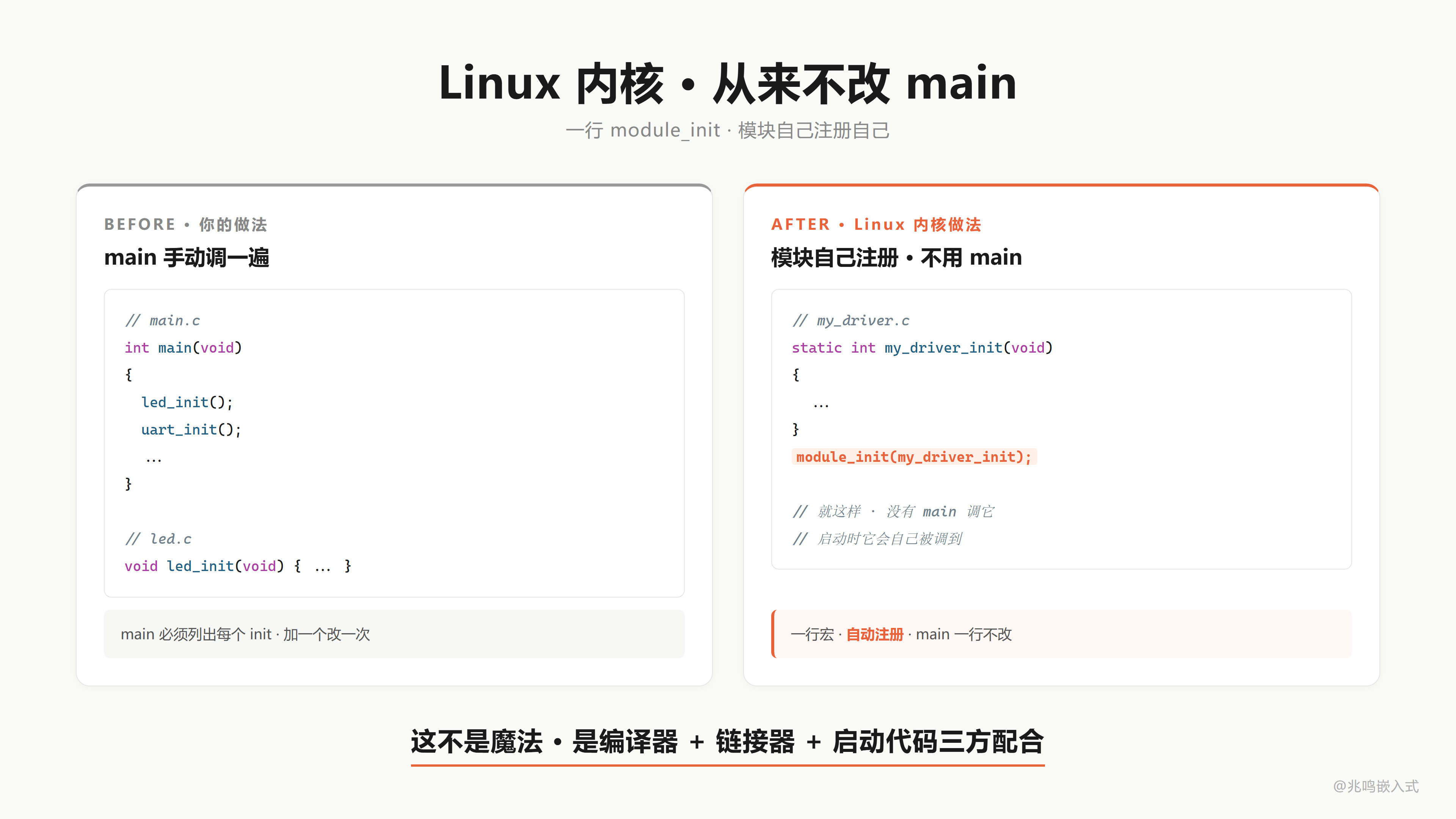
Linux 内核的 start_kernel 从来不改。加一个新驱动,只写一行 module_init(my_init)。
这一章揭穿这个魔法。
17.1 main 越写越长
裸机或者教学项目里,启动期初始化是这样:
int main(void)
{
led_init();
uart_init();
i2c_init();
spi_init();
encoder_init();
motor_init();
temp_sensor_init();
/* ... 又一个新驱动 ... */
new_driver_init();
while (1) { /* 业务循环 */ }
}
每加一个驱动,main 里加一行。文件越来越长,main 越来越胖。
更糟的是,main 必须知道有哪些驱动。这违反一个最基本的设计原则:
开闭原则(Open / Closed Principle):对扩展开放,对修改关闭。
加新驱动是“扩展“,本来不应该改 main。但你不得不改 main。每改一次 main 都是一次回归测试机会。
Linux 内核几千个驱动如果每加一个都要改一次 start_kernel,早就乱了。

17.2 module_init 是个魔法吗
打开 Linux 内核任何一个驱动文件 drivers/leds/leds-gpio.c 末尾,你会看到:
static int __init gpio_led_init(void)
{
return platform_driver_register(&gpio_led_driver);
}
module_init(gpio_led_init);
就一行 module_init(gpio_led_init)。
然后这个驱动作者不写 main。内核启动的时候,gpio_led_init 自己就被调到了。
魔法?不是。是编译器 + 链接器 + 启动代码三方配合的机制。
module_init(fn) 这一行,做了一件事,把 fn 这个函数指针的地址,塞进了一个特殊的地方。
17.3 宏展开真相
把 module_init 这个宏展开看看。打开 Linux 内核 include/linux/init.h:
第 316 行:#define __initcall(fn) device_initcall(fn),并且第 318 行附近 module_init 等价于 __initcall。
第 311 行:#define device_initcall(fn) __define_initcall(fn, 6)
第 282 行:#define __define_initcall(fn, id) ___define_initcall(fn, id, .initcall##id)
第 268 行(关键展开):
#define ____define_initcall(fn, __unused, __name, __sec) \
static initcall_t __name __used \
__attribute__((__section__(__sec))) = fn;
最终展开成(简化):
static initcall_t __initcall_gpio_led_init __used
__attribute__((__section__(".initcall6.init"))) = gpio_led_init;
一行。
这一行做的事:
static initcall_t __initcall_gpio_led_init:定义一个静态函数指针变量。= gpio_led_init:让它指向gpio_led_init这个函数。__attribute__((__section__(".initcall6.init"))):告诉编译器,把这个变量放到.initcall6.init段。__used:告诉编译器,这个变量虽然没人显式引用,也不要优化掉。
这个 .initcall6.init 段是关键。每个驱动文件写一行 module_init,编译后每个 .o 文件里都有一个函数指针变量、放在 .initcall6.init 段。
为什么是 6?看 include/linux/init.h 第 296-313 行,内核分了 8 级 initcall:
0 pure 最早,纯逻辑初始化
1 core 核心子系统
2 postcore 核心子系统之后
3 arch 架构相关
4 subsys 子系统
5 fs 文件系统
6 device 设备驱动(默认级别,module_init 落在这里)
7 late 最晚
不同级别让你控制初始化顺序。module_init 走第 6 级(device),适合大多数普通驱动。

17.4 链接器收集
编译完,几百个 .o 文件,每个都有自己的 .initcall6.init 段。
接下来链接器上场。
Linux 内核链接脚本 include/asm-generic/vmlinux.lds.h 第 908-925 行:
#define INIT_CALLS_LEVEL(level) \
__initcall##level##_start = .; \
KEEP(*(.initcall##level##.init)) \
KEEP(*(.initcall##level##s.init))
#define INIT_CALLS \
__initcall_start = .; \
KEEP(*(.initcallearly.init)) \
INIT_CALLS_LEVEL(0) \
INIT_CALLS_LEVEL(1) \
INIT_CALLS_LEVEL(2) \
INIT_CALLS_LEVEL(3) \
INIT_CALLS_LEVEL(4) \
INIT_CALLS_LEVEL(5) \
INIT_CALLS_LEVEL(rootfs) \
INIT_CALLS_LEVEL(6) \
INIT_CALLS_LEVEL(7) \
__initcall_end = .;
字面意思:把所有 .o 文件里的 .initcall0.init、.initcall1.init…….initcall7.init 段,按级别合并到一起。__initcall_start 标记数组开头,__initcall_end 标记结尾。KEEP(*(...)) 防止 LTO 优化把“没人显式引用“的变量裁掉。
合并之后,整个内核 ROM 里有一片连续的内存,里面是几千个驱动 init 函数的指针,按 level 排好。

17.5 启动时遍历
内核启动到一定阶段,会调一个函数 do_initcalls。打开 init/main.c 第 1297 行:
static void __init do_initcalls(void)
{
int level;
size_t len = saved_command_line_len + 1;
char *command_line;
command_line = kzalloc(len, GFP_KERNEL);
if (!command_line)
panic("%s: Failed to allocate %zu bytes\n", __func__, len);
for (level = 0; level < ARRAY_SIZE(initcall_levels) - 1; level++) {
/* Parser modifies command_line, restore it each time */
strcpy(command_line, saved_command_line);
do_initcall_level(level, command_line);
}
kfree(command_line);
}
initcall_levels[] 在第 1252 行:
static initcall_entry_t *initcall_levels[] __initdata = {
__initcall0_start,
__initcall1_start,
__initcall2_start,
__initcall3_start,
__initcall4_start,
__initcall5_start,
__initcall6_start,
__initcall7_start,
__initcall_end,
};
按级别循环,每一级调 do_initcall_level,里面就是一个 for 循环遍历该级数组(init/main.c 第 1282 行):
static void __init do_initcall_level(int level, char *command_line)
{
initcall_entry_t *fn;
/* ... parse command line ... */
for (fn = initcall_levels[level]; fn < initcall_levels[level+1]; fn++)
do_one_initcall(initcall_from_entry(fn));
}
就这么简单。
调用者从头到尾不知道有哪些驱动。它只管按级别遍历这片内存,挨个调过去。
加一个新驱动,你只写 module_init(xxx) 一行。链接器自动把你塞进数组,启动时自动调到你。
start_kernel 一行不改。

17.6 在 PC 上山寨一份
配套代码 pc/initcall.h 把这一招砍到最小:
typedef int (*initcall_t)(void);
#define MODULE_INIT(fn) \
static initcall_t __initcall_##fn \
__attribute__((used, section("my_initcall"))) = fn
extern initcall_t __start_my_initcall[];
extern initcall_t __stop_my_initcall[];
void do_initcalls(void);
只有一个级别(不分 0-7),段名叫 my_initcall。GCC 在 ELF/PE 平台上为合法 C 标识符段名(不以点开头)自动生成 __start_<sec> / __stop_<sec> 符号,所以这里不需要自己写链接脚本。
do_initcalls 实现极简(pc/initcall.c):
void do_initcalls(void)
{
initcall_t *fn;
for (fn = __start_my_initcall; fn < __stop_my_initcall; fn++) {
(*fn)();
}
}
然后给 4 个驱动文件 drv_led.c / drv_uart.c / drv_i2c.c / drv_spi.c 各加一行:
/* drv_led.c */
static int led_init(void)
{
printf("[led] led_init: register LED driver\n");
return 0;
}
MODULE_INIT(led_init);
main.c 里只调一次 do_initcalls():
int main(void)
{
do_initcalls();
return 0;
}
main 里没有任何 led_init / uart_init / i2c_init / spi_init 的字样。main 不知道有哪些驱动。
跑 ./demo:
[do_initcalls] sweep .my_initcall section from 0040b000 to 0040b010
[do_initcalls] call 004015e1
[led] led_init: register LED driver
[do_initcalls] call 00401625
[uart] uart_init: register UART driver
[do_initcalls] call 00401669
[i2c] i2c_init: register I2C driver
[do_initcalls] call 004016ad
[spi] spi_init: register SPI driver
[do_initcalls] done, 4 initcalls
4 个驱动全部被调到,main 一字不动。
加第 5 个驱动?新建 drv_temp.c:
#include "initcall.h"
#include <stdio.h>
static int temp_init(void)
{
printf("[temp] temp_init\n");
return 0;
}
MODULE_INIT(temp_init);
加到 Makefile 的 SRCS。main.c 0 改动。这就是开闭原则的工业级落地。
17.7 RT-Thread / Zephyr / 裸机一样能用
有的朋友会问,我用 RT-Thread、用 FreeRTOS、用 Zephyr,这一招用得了吗?
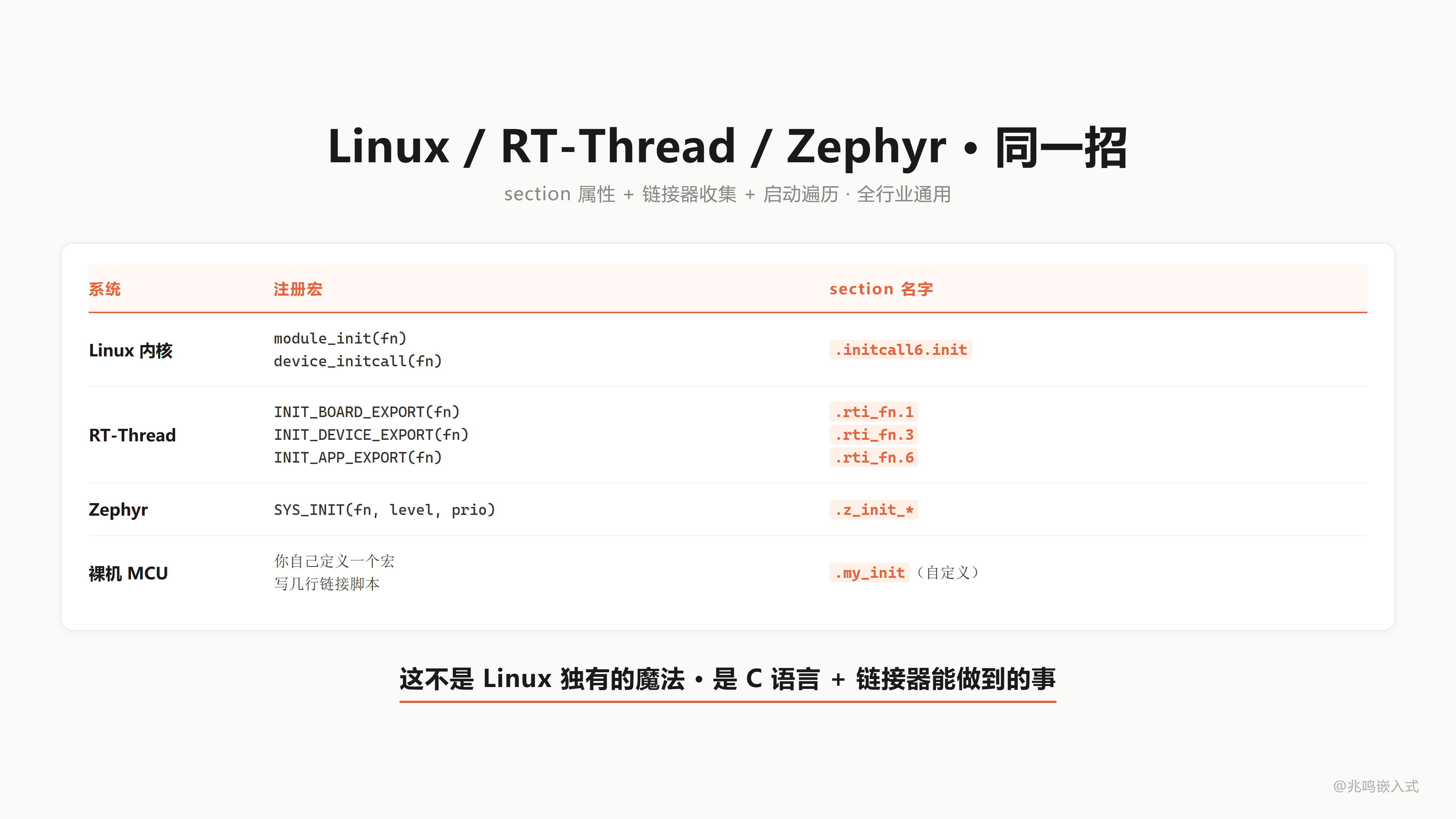
用得了。机制完全一样,只是宏的名字不同。
RT-Thread(include/rtdef.h):
INIT_BOARD_EXPORT(fn) /* 段名 .rti_fn.1 */
INIT_DEVICE_EXPORT(fn) /* 段名 .rti_fn.3 */
INIT_COMPONENT_EXPORT(fn) /* 段名 .rti_fn.4 */
INIT_ENV_EXPORT(fn) /* 段名 .rti_fn.5 */
INIT_APP_EXPORT(fn) /* 段名 .rti_fn.6 */
完全一样的 __attribute__((section())) + 链接脚本合并 + 启动遍历。rt_components_init() 是它的 do_initcalls。
Zephyr:SYS_INIT(fn, level, priority),level 取 PRE_KERNEL_1 / PRE_KERNEL_2 / POST_KERNEL / APPLICATION,机制同源。
裸机 STM32:自己定义 section + 链接脚本里加几行(详见 oop-in-c/code/17-initcall/platform-mcu/stm32/),main 里调一次 do_initcalls()。
这不是 Linux 独有的魔法。这是 C 语言 + 链接器就能做到的事,任何 C 项目都能用。
17.8 C 对比 C++:全局对象自动构造
C++ 有一个特性:全局对象的构造函数会在 main 之前自动跑:
class LedDriver {
public:
LedDriver() {
register_with_kernel(); // 启动期自动跑
}
};
LedDriver g_led_driver; // 全局对象,构造函数 main 之前调
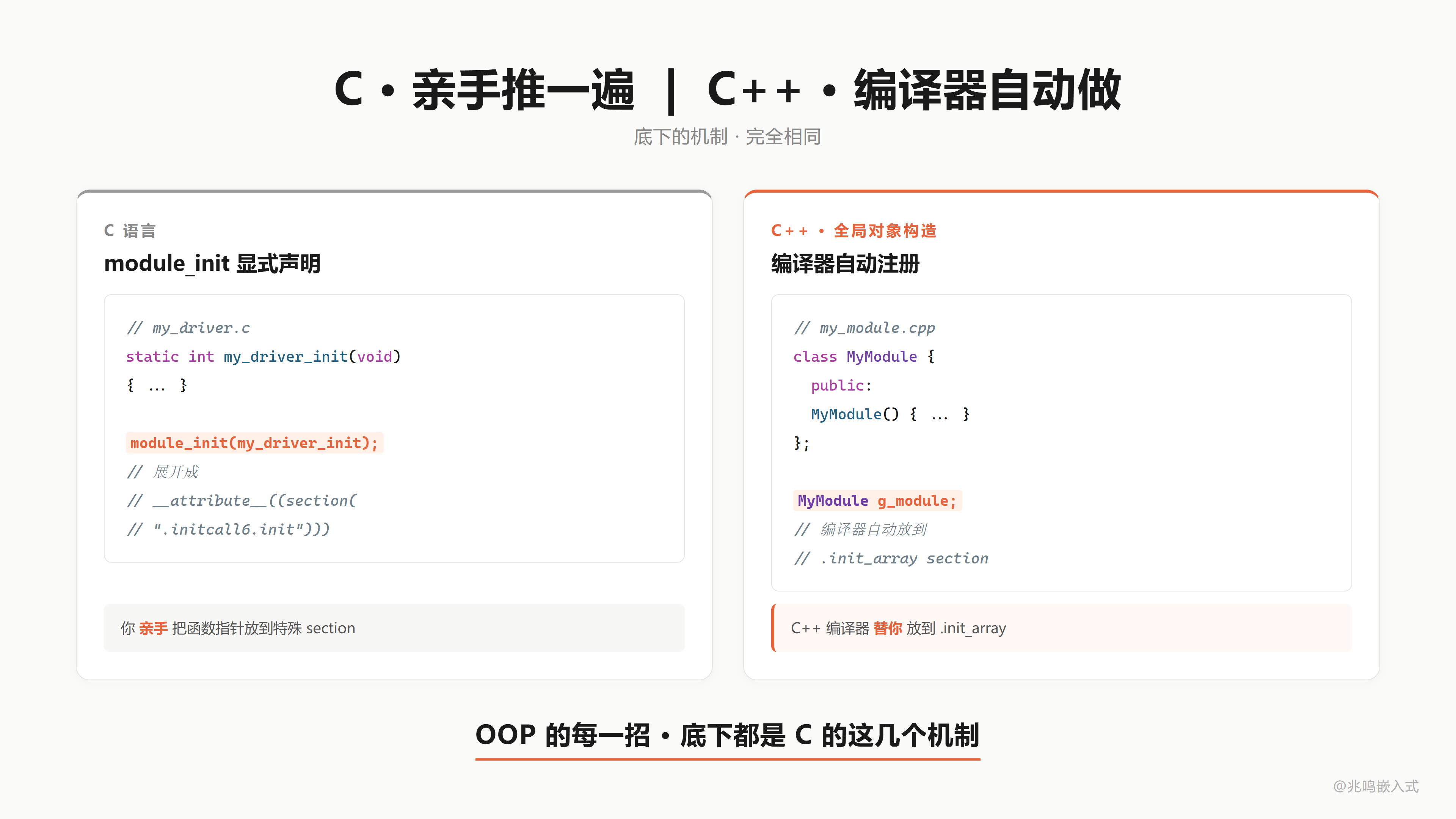
你可能觉得这是黑魔法。其实 C++ 编译器做的事和你刚才学的 module_init 一模一样:
- 把每个全局对象的构造函数地址,塞进一个特殊段叫
.init_array(或.ctors)。 - C 运行时启动代码(crt0)启动期遍历
.init_array,挨个调用。 - 调完了才进 main。
__initcall6.init 段 ↔ .init_array 段。
module_init(fn) ↔ 全局对象的构造函数。
do_initcalls() ↔ crt0 的启动代码遍历。
C 里你亲手写 MODULE_INIT(fn) + section attribute + 链接脚本,C++ 编译器自动做同一招。
你以为 C++ 全局对象自动构造是黑魔法。你写过 module_init 你就明白:底下就是这一招。
17.9 视频里没讲透的几个细节
17.9.1 KEEP(*) 防止 LTO 裁掉
Linux 内核链接脚本里 KEEP(*(.initcall6.init)) 这一行的 KEEP,是告诉链接器“哪怕没人显式引用这个段里的内容,也不要把它优化掉“。
LTO(Link-Time Optimization)会做“死代码消除“,没人引用的变量直接丢。你的 __initcall_xxx 变量本来就没人显式引用(它是被链接器收集的),LTO 一开就把它整段干掉了。
__used attribute 在编译期保留,KEEP 在链接期保留。两条都不能少。
17.9.2 PE / ELF 平台的差异
Linux 内核是 ELF。ELF 平台上 GCC + ld 自动给“以 C 标识符开头的 section“生成 __start_<sec> / __stop_<sec> 符号。
PC 上 MinGW 用 PE 格式,但 GCC 端的处理一致。所以 ch17 PC 版能直接用 __start_my_initcall / __stop_my_initcall,不需要写链接脚本。
注意:section 名字必须不以点开头才是合法 C 标识符(Linux 内核里用 .initcall6.init 走自己的链接脚本,绕过这个限制)。
17.9.3 段名带点是怎么处理的
Linux 内核段名 .initcall6.init 带点,链接器不会自动给它生成 __start__initcall6.init 这种符号(C 标识符里不能有点)。所以内核自己在 vmlinux.lds.h 里手动写 __initcall6_start = .; 和后面的标记。
如果你给 STM32 项目自己写 initcall,建议两条路二选一:
- 段名用合法 C 标识符(
my_initcall不带点),让 GCC 自动生成边界符号。 - 段名带点,自己在 .ld 里手写
__my_initcall_start = .;标记。
走哪条都行,习惯就好。
17.9.4 级别(level)什么时候有用·BOARD / DEVICE / APP 三档
简单项目就一个级别够用,复杂项目分级别。例子:
- I2C 总线驱动必须在 I2C 设备驱动之前 init(不然设备 init 时找不到总线)。给总线 level=2,设备 level=4,启动期总线先跑。
设计原理就一句:基础设施在前,上层依赖在后。GPIO 没初始化好的时候让 LED 驱动 probe 是会崩的,所以 LED 必须晚于 GPIO;I2C 控制器没初始化好的时候让 I2C 设备驱动 probe 也会崩,所以 I2C 设备必须晚于控制器。级别的存在就是把这种“前后依赖“显式写出来,不用驱动作者去 main 里手排顺序。
BOARD / DEVICE / APP 三档够多数项目用。Linux 内核 0-7 共 8 级(pure / core / postcore / arch / subsys / fs / device / late)。工业代码命名习惯不同,对应不严格,思路是一样的:基础设施在前,上层依赖在后。
裸机项目可以从简单 1 级版本起步(本章 PC demo 就是一级),项目复杂度起来再加级别。
17.9.5 同一级别内部的顺序
同级别内部的初始化顺序,由链接顺序决定(.o 文件在 gcc xxx.c yyy.c zzz.c 命令行里的顺序)。理论上不应该依赖这个顺序,同级别的驱动应该没有相互依赖。如果有,提级别。
LTO 模式下编译器会换顺序,所以 Linux 内核 include/linux/init.h 里有专门的 CONFIG_LTO_CLANG 分支处理(第 223 行起),强制保序。
17.9.6 失败处理
每个 initcall 函数返回 int。失败返回非 0。Linux 内核 do_one_initcall(init/main.c 第 1222 行):
int __init_or_module do_one_initcall(initcall_t fn)
{
int count = preempt_count();
char msgbuf[64];
int ret;
if (initcall_blacklisted(fn))
return -EPERM;
do_trace_initcall_start(fn);
ret = fn();
do_trace_initcall_finish(fn, ret);
/* ... 抢占计数检查、IRQ 检查 ... */
return ret;
}
它会抓住返回值,但不会因为一个驱动失败就停整个启动。日志里记一行 “initcall xxx returned with -ENODEV”,继续跑下一个。
为什么不 panic?内核启动期 1000 多个 initcall,少一个驱动的硬件没插不应该让整机起不来,工程上的“宽容启动“思路。裸机 / RTOS 项目的 do_initcalls 可以根据需要决定:失败立刻 panic 还是只记日志继续。生产代码里大多是后者,方便边出 bug 边迭代。
17.9.7 模块自卸载
本章只讲 module_init。Linux 内核还有 module_exit(fn),把 fn 塞进 .exitcall 段。卸载模块时遍历这个段调过去。
裸机不需要这一招(设备开机用到关机,不卸载)。RTOS 偶尔用(动态加载脚本插件之类)。
17.10 你现在的代码在 STM32 上长什么样
STM32 工程比 PC 多一步:链接脚本(.ld)里要手动加段定义。打开 CubeMX 生成的 STM32xxx_FLASH.ld,在 .text 段后面加:
SECTIONS
{
/* ... 已有的 .isr_vector / .text / .rodata 等 ... */
.my_initcall : ALIGN(4)
{
__start_my_initcall = .;
KEEP(*(my_initcall*))
__stop_my_initcall = .;
} > FLASH
}
要点:
KEEP(...)防止链接器 LTO 优化把“没人显式引用“的 initcall 段裁掉。__start_my_initcall/__stop_my_initcall是手写边界符号(PC 上 GCC 自动生成,STM32 链接脚本里要手写)。- 段挂在
> FLASH,函数指针表存在 ROM 里,不占 RAM。
驱动文件写法和 PC 版完全一样:
/* drv_led_stm32.c */
#include "initcall.h"
static int led_stm32_init(void)
{
/* 真机上这里调 HAL_GPIO_Init 等 */
register_my_led_driver();
return 0;
}
MODULE_INIT(led_stm32_init);
main 里启动期 do_initcalls() 调一次。每加一个新驱动就多一份 .c + 一行 MODULE_INIT,main 0 改动,链接器自动把所有驱动收集到那个段里。
完整说明见 oop-in-c/code/17-initcall/platform-mcu/stm32/README.md。
17.11 Linux 用户态对照·attribute((constructor)) 同款机制
Linux 用户态代码(不写内核驱动)也能用同一招。glibc 的 __attribute__((constructor)) 把函数指针塞进 .init_array 段,crt0 启动期遍历。等价于你的 MODULE_INIT:
__attribute__((constructor))
static void my_init(void)
{
printf("called before main\n");
}
效果一样,机制同源。
17.12 工业代码里的 initcall 长什么样
工业控制板项目用的就是 RT-Thread 风格的 initcall:每个 driver 文件末尾一行 INIT_DEVICE_EXPORT(xxx_init),main 里只 rt_components_init() 调一次,全部驱动自动挂上。多套产品共用一份驱动代码,每套产品只是板级初始化文件不同,这套机制让“共享驱动 + 独立板级“成为现实。
工业实战的完整代码和踩坑细节放在第 19 章主控案例里展开,这里不重复。
17.13 完整源码清单
把下面的代码块分别保存到对应的文件,目录结构和 oop-in-c/code/17-initcall/pc/ 一致。make && ./demo 即可跑通。
文件 1:main.c(33 行)
启动入口。注意 main 里没有显式调用 led_init / uart_init / i2c_init / spi_init,只调一次 do_initcalls()。
/* SPDX-License-Identifier: MIT */
/*
* main.c - 启动入口
*
* 注意 main 里没有显式调用 led_init / uart_init / i2c_init / spi_init。
* 加一个驱动文件 drv_xxx.c 写一行 MODULE_INIT(xxx_init),main 一字不改。
*
* 这就是 Linux 内核的开闭原则:对扩展开放,对修改关闭。
*/
#include "initcall.h"
#include <stdio.h>
int main(void)
{
printf("=========================================\n");
printf(" ch17 - linker-time auto registration\n");
printf("=========================================\n");
printf("\n>>> kernel boot, run initcalls <<<\n\n");
do_initcalls();
printf("\n>>> all drivers ready <<<\n");
printf("\n=========================================\n");
printf(" main never references any drv_* function\n");
printf("=========================================\n");
printf("\nPress Enter to exit...\n");
getchar();
return 0;
}
文件 2:initcall.h(48 行)
机制核心。MODULE_INIT(fn) 宏把函数指针塞进 .my_initcall 段,启动期遍历。
/* SPDX-License-Identifier: MIT */
/*
* initcall.h - 山寨 Linux 内核 initcall 机制
*
* 核心三件套:
* 1. __attribute__((section(...))):把函数指针塞进特殊段
* 2. 链接器 / 链接脚本把所有这种段合并到一起
* 3. 启动代码遍历这个段,挨个调用
*
* 真实内核版定义在 include/linux/init.h 第 268 行起:
* #define ____define_initcall(fn, __unused, __name, __sec) \
* static initcall_t __name __used \
* __attribute__((__section__(__sec))) = fn;
*
* 书里的 PC 版砍掉级别(内核分 8 级),就一个级别 ".my_initcall"。
*/
#ifndef INITCALL_H
#define INITCALL_H
typedef int (*initcall_t)(void);
/*
* MODULE_INIT(fn):把 fn 的地址塞进 .my_initcall 段
*
* GCC 的 section attribute 把变量放到指定段。
* 链接器自动收集所有 .my_initcall 段的内容到一起。
*
* __used 告诉编译器:这个变量虽然没人显式引用,也不要优化掉。
* 内核里的 __used 和这一招同源。
*/
#define MODULE_INIT(fn) \
static initcall_t __initcall_##fn \
__attribute__((used, section("my_initcall"))) = fn
/*
* 启动代码用这两个标记找到段的边界。
* GCC 在 ELF / PE 平台上会为合法 C 标识符段名(不以点开头)自动生成
* __start_<sec> / __stop_<sec> 符号。Linux 内核里也用同源机制,
* 不过内核自己写链接脚本生成 __initcall_start / __initcall_end。
*/
extern initcall_t __start_my_initcall[];
extern initcall_t __stop_my_initcall[];
void do_initcalls(void);
#endif /* INITCALL_H */
文件 3:initcall.c(39 行)
启动期遍历 .my_initcall 段,挨个调过去。这就是 Linux 内核 do_initcalls 砍到最小的版本。
/* SPDX-License-Identifier: MIT */
/*
* initcall.c - 启动期遍历 .my_initcall 段
*
* 真实内核的 do_initcalls 在 init/main.c 第 1297 行:
*
* static void __init do_initcalls(void)
* {
* int level;
* ...
* for (level = 0; level < ARRAY_SIZE(initcall_levels) - 1; level++) {
* ...
* do_initcall_level(level, command_line);
* }
* }
*
* 书里的版本砍掉级别和命令行,直接遍历从 __start 到 __stop。
*/
#include "initcall.h"
#include <stdio.h>
void do_initcalls(void)
{
initcall_t *fn;
printf("[do_initcalls] sweep .my_initcall section "
"from %p to %p\n",
(void *)__start_my_initcall, (void *)__stop_my_initcall);
for (fn = __start_my_initcall; fn < __stop_my_initcall; fn++) {
printf("[do_initcalls] call %p\n", (void *)*fn);
(*fn)();
}
printf("[do_initcalls] done, %ld initcalls\n",
(long)(__stop_my_initcall - __start_my_initcall));
}
文件 4:drv_led.c(21 行)
LED 驱动模块。文件里没有任何对 main 或别人的函数引用,通过 MODULE_INIT 把自己注册到段里。
/* SPDX-License-Identifier: MIT */
/*
* drv_led.c - LED 驱动模块
*
* 这个文件里没有任何对 main 或别人的函数引用,它通过 MODULE_INIT
* 注册自己。启动期 do_initcalls 会扫到 led_init 并调到。
*
* Linux 内核的 module_init(fn) 宏,最终也展开到这个机制。
*/
#include "initcall.h"
#include <stdio.h>
static int led_init(void)
{
printf(" [led] led_init: register LED driver\n");
return 0;
}
MODULE_INIT(led_init);
文件 5:drv_uart.c(12 行)
UART 驱动模块。和 drv_led.c 同构,只是函数名不同。
/* SPDX-License-Identifier: MIT */
#include "initcall.h"
#include <stdio.h>
static int uart_init(void)
{
printf(" [uart] uart_init: register UART driver\n");
return 0;
}
MODULE_INIT(uart_init);
文件 6:drv_i2c.c(12 行)
I2C 驱动模块。
/* SPDX-License-Identifier: MIT */
#include "initcall.h"
#include <stdio.h>
static int i2c_init(void)
{
printf(" [i2c] i2c_init: register I2C driver\n");
return 0;
}
MODULE_INIT(i2c_init);
文件 7:drv_spi.c(12 行)
SPI 驱动模块。
/* SPDX-License-Identifier: MIT */
#include "initcall.h"
#include <stdio.h>
static int spi_init(void)
{
printf(" [spi] spi_init: register SPI driver\n");
return 0;
}
MODULE_INIT(spi_init);
文件 8:Makefile(25 行)
# Makefile - ch17 initcall (PC)
#
# 注意:__start_my_initcall / __stop_my_initcall 这两个符号是 GNU ld 在
# ELF 平台自动生成的(任何独立 section 都会有)。MinGW 的 PE 链接器同样支持。
#
# 书里额外在 drv_dummy.c 里准备一份 fallback,确保即使链接器没有给你
# 自动生成边界符号,也能跑通。
CC = gcc
CFLAGS = -Wall -Wextra -std=c99
TARGET = demo
SRCS = main.c initcall.c drv_led.c drv_uart.c drv_i2c.c drv_spi.c
.PHONY: all clean run
all: $(TARGET)
$(TARGET): $(SRCS)
$(CC) $(CFLAGS) -o $(TARGET) $(SRCS)
run: $(TARGET)
./$(TARGET)
clean:
rm -f $(TARGET) $(TARGET).exe
跑一遍
cd oop-in-c/code/17-initcall/pc
make
./demo
期望输出
=========================================
ch17 - linker-time auto registration
=========================================
>>> kernel boot, run initcalls <<<
[do_initcalls] sweep .my_initcall section from 0040b000 to 0040b010
[do_initcalls] call 004015e1
[led] led_init: register LED driver
[do_initcalls] call 00401625
[uart] uart_init: register UART driver
[do_initcalls] call 00401669
[i2c] i2c_init: register I2C driver
[do_initcalls] call 004016ad
[spi] spi_init: register SPI driver
[do_initcalls] done, 4 initcalls
>>> all drivers ready <<<
=========================================
main never references any drv_* function
=========================================
main.c 里没有任何 led_init / uart_init / i2c_init / spi_init 字样。它不知道有这些驱动,但它们全部被调到了。
加第 5 个驱动?新建一个 drv_temp.c,加到 Makefile 的 SRCS 里。main 0 改动。
17.14 视频回放
一句话
调用者不需要知道有哪些模块,模块自己注册。
这才是真正的开闭原则,对扩展开放,对修改关闭。
下一章
下一章把走过的路在书里串一遍。