第 16 章 · 为什么 Linux 一点都不难 · 你已经在写 Linux 风格代码
配套代码:oop-in-c/code/16-linux-style/
做嵌入式 11 年,我发现 Linux 一点都不难。
是有人故意让你觉得它难。
这一章给你戳穿。前提是你已经懂了 ch15 的 platform 抽象。
16.1 上一章隔离了主板,但芯片层呢
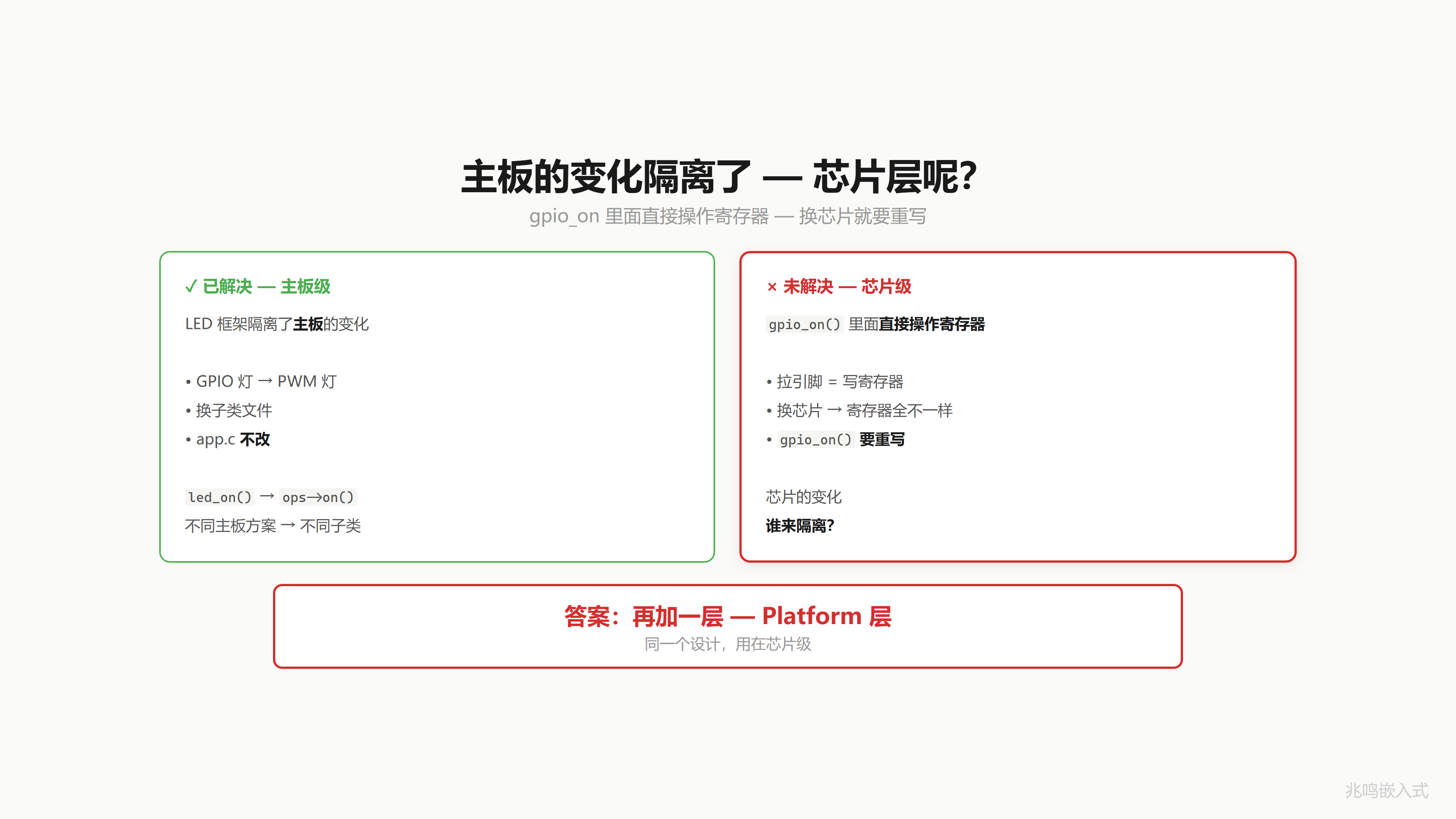
ch15 的 LED 框架隔离了主板:换主板方案,应用层 0 改动。
但 gpio_on 里头调的是 platform_gpio_write 这个封装函数,封装函数内部走 ops 分发到当前选定的 platform 实例(PC 版 / STM32 版 / Linux 版),platform 实例本身就是写寄存器、写 sysfs 的具体代码。换芯片呢?从 STM32 换到瑞萨,BSRR 寄存器换名字了,led_stm32.c 里的实现要重写。
主板的变化你的 LED 层隔离了。芯片的变化,谁来隔离?
16.2 同一招用第二次:再加一层
答案,再加一层。Platform 层。
ch15 的 struct led_base + led_ops 框架是设备层,跑在 LED / sensor / motor 这一类业务对象上。ch16 要在它下面加一层,把“具体芯片的 GPIO 怎么写电平“这件事也用 ops 表抽象出来。结构和上一章一字不差,只是层次往下移了一层:
ch15 设备层: led_base + led_ops 应用层调 led_on(handle)
ch16 平台层: gpio_chip + gpio_chip 里的函数指针 led 驱动调 gpiod_set_value(desc)
之前你看不到的 platform_gpio_write 内部,今天打开看里面:它要落到具体芯片的寄存器,本章把这一层用 gpio_chip 抽象起来。
不看寄存器,看功能。
每家芯片的 GPIO 都能干什么?设方向、写电平、读电平。功能一样,寄存器不同。
每家芯片的 I2C 都能干什么?发起传输、接收数据。功能一样,寄存器不同。
UART、SPI 也一样,每家芯片提供同一组功能(产生时序、收发字节),实现不同。
所以不看实现,按功能定义接口:
struct gpio_ops {
int (*direction_output)(struct gpio_chip *gc, unsigned int offset, int value);
int (*get)(struct gpio_chip *gc, unsigned int offset);
void (*set)(struct gpio_chip *gc, unsigned int offset, int value);
};
任何一家芯片都能实现这套接口。功能一样。

16.3 四层架构
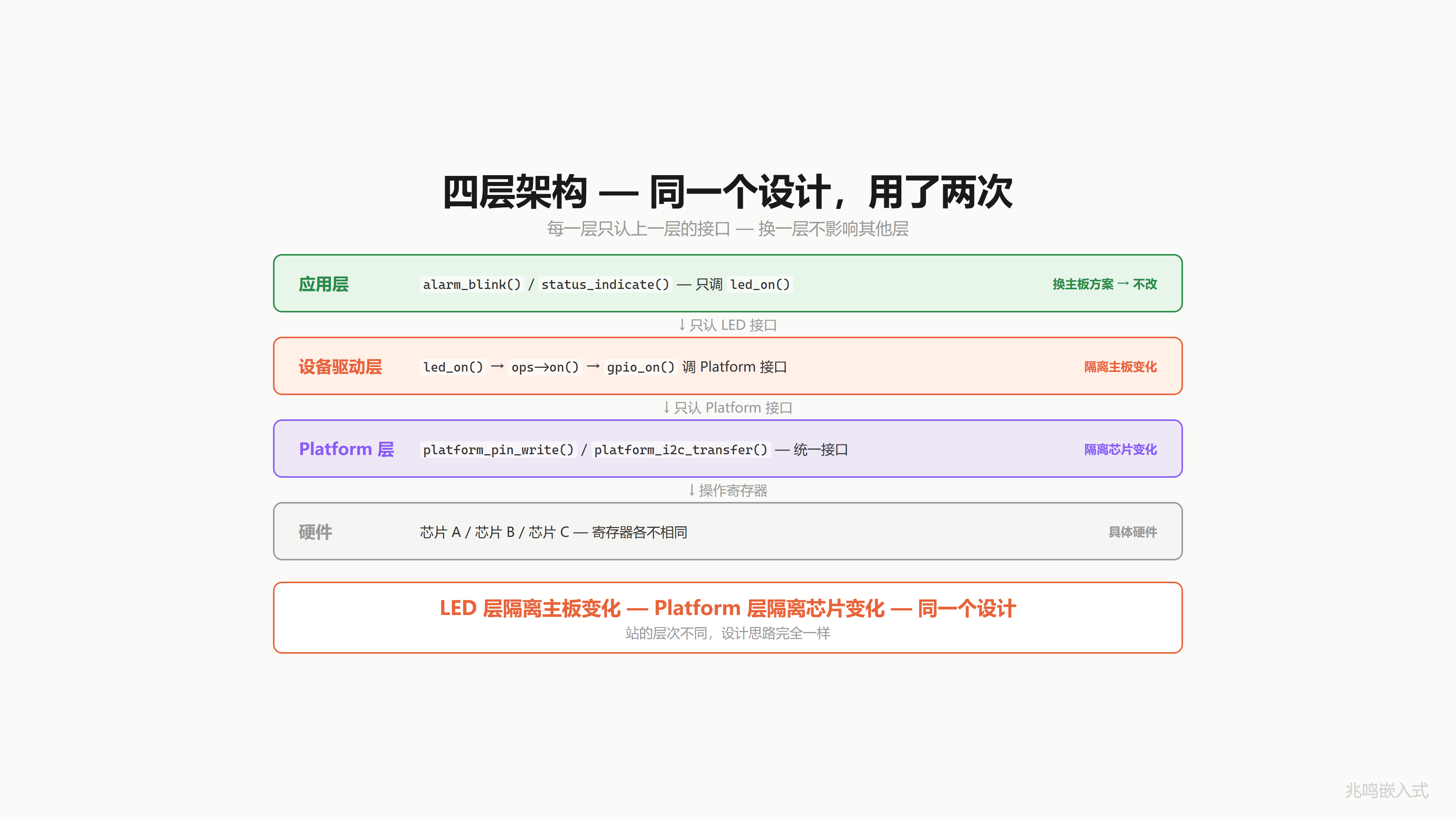
应用层 只认 LED 接口 换主板方案不改
LED 驱动层 只认 Platform 接口 换芯片不改
Platform 层 对接具体芯片 芯片 A、B、C 各一份
具体硬件 寄存器 芯片厂卖给你的
应用层调 led_on,led 驱动层调 platform 的写引脚接口,platform 层调具体芯片的寄存器。每一层只调下一层。
LED 层隔离主板变化(同一份 led 代码,跑在 GPIO / PWM / I2C 三种灯上)。Platform 层隔离芯片变化(同一份 platform 接口,跑在不同 SoC 上)。
同一招,隔离变化,用了两次。站的层次不同,机制完全相同。
16.4 1×N vs N+M:乘法变加法
来算一笔账。
没有 platform 层:你有 3 种设备驱动(LED / sensor / motor),要跑在 5 家 SoC 上。每种驱动对每家 SoC 写一份。
driver × chip = 3 × 5 = 15 份代码
加一家 SoC?再写 3 份。15 → 18。
有 platform 层:3 种设备驱动只写一次,通过 platform 接口调用。5 家 SoC 各写一份 platform 适配。
driver + chip = 3 + 5 = 8 份代码
加一家 SoC?写 1 份 platform 适配就够。8 → 9。设备驱动一行不动。
从乘法变成了加法。3 × 5 = 15,3 + 5 = 8。
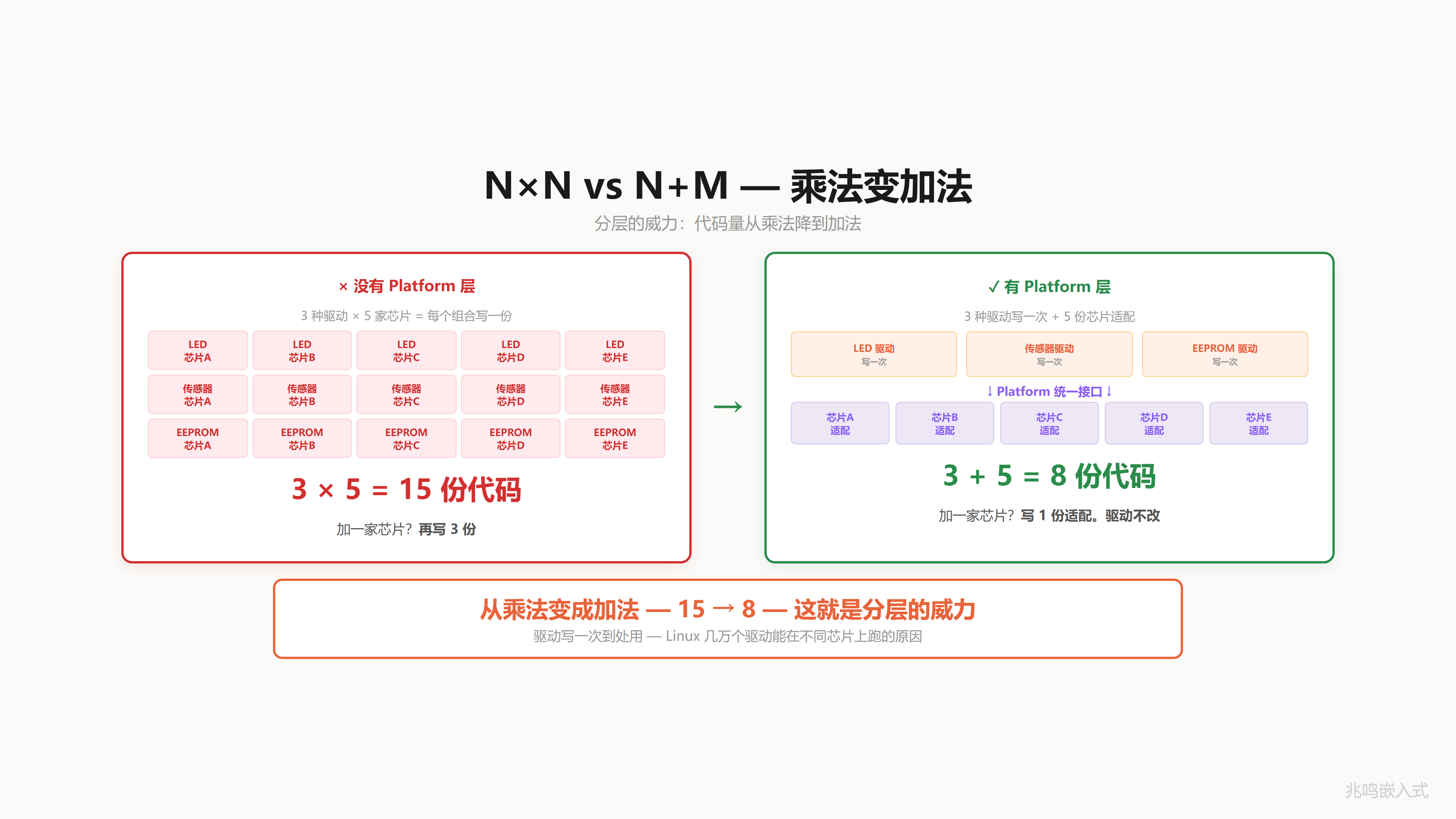
而且这 3 份设备驱动写出来,谁都能用。换芯片不影响。这就是 Linux 内核几万个驱动能在不同 SoC 上跑的原因。
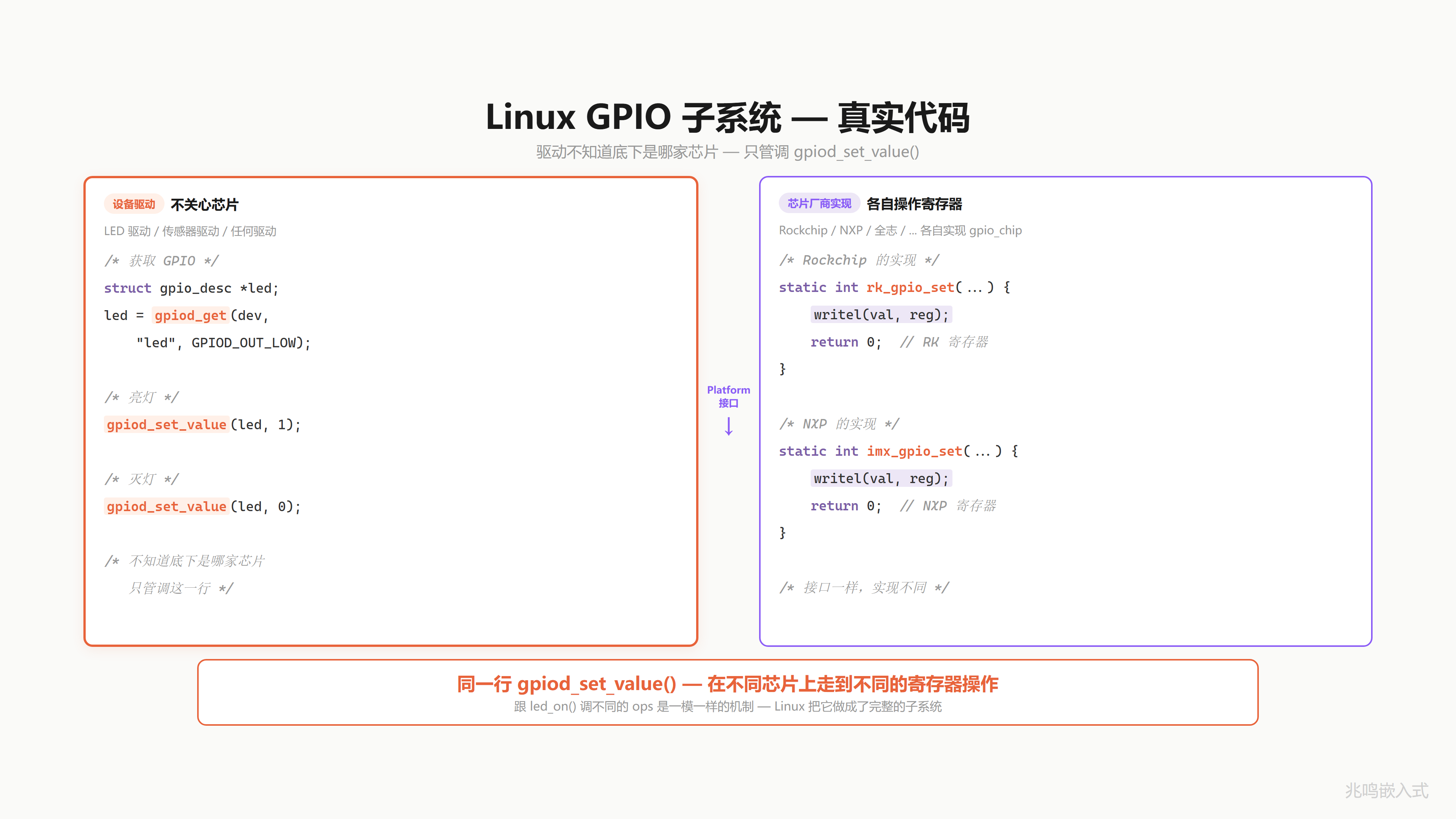
16.5 Linux GPIO 子系统:真实代码
打开 Linux 内核 drivers/gpio/gpiolib.c 第 3245 行:
void gpiod_set_value(struct gpio_desc *desc, int value)
{
VALIDATE_DESC_VOID(desc);
WARN_ON(desc->gdev->chip->can_sleep);
gpiod_set_value_nocheck(desc, value);
}
EXPORT_SYMBOL_GPL(gpiod_set_value);
调到底是同一个 gpiolib.c 第 3051 行的 gpiod_set_raw_value_commit:
static void gpiod_set_raw_value_commit(struct gpio_desc *desc, bool value)
{
struct gpio_chip *gc;
gc = desc->gdev->chip;
trace_gpio_value(desc_to_gpio(desc), 0, value);
gc->set(gc, gpio_chip_hwgpio(desc), value);
}
最后一行 gc->set(gc, gpio_chip_hwgpio(desc), value),
这就是你 ch11 / ch15 学的多态 dispatch。gc 是 struct gpio_chip *,gc->set 是函数指针。每家芯片的 set 字段指向自己的 set 实现。同一行 gc->set(...),红灯走 vendorA 的 set,绿灯走 vendorB 的 set。
驱动作者一行不改。
/* drivers/leds/leds-gpio.c 的简化版 */
static void gpio_led_set(struct led_classdev *led_cdev,
enum led_brightness value)
{
struct gpio_led_data *led_dat =
container_of(led_cdev, struct gpio_led_data, cdev);
gpiod_set_value(led_dat->gpiod, !!value);
}
这一行 container_of 你 ch13 学过。这一行 gpiod_set_value 你刚刚见到,它内部走 gc->set 多态 dispatch 到具体 SoC。
整个 leds-gpio.c 文件 200 多行,跨所有 SoC 通吃。芯片厂的工作只是写自己那份 gc->set 实现,driver 作者一行不动。
struct gpio_chip 真身在 include/linux/gpio/driver.h 第 415 行,挑核心字段看:
struct gpio_chip {
const char *label; /* "vendorA-gpio" 这种名字 */
struct device *parent; /* 关联的 device 节点 */
int (*direction_output)(struct gpio_chip *gc,
unsigned int offset, int value);
int (*get)(struct gpio_chip *gc, unsigned int offset);
void (*set)(struct gpio_chip *gc, unsigned int offset, int value);
/* ... 还有 30 多个字段:中断、热插拔、debug、节点管理 ... */
};
第一段是元数据(label、parent),相当于 ch11 你的 struct led_base 里的 name。中间一大堆函数指针,就是你的 struct led_ops,只是字段更多。后面省略的字段是中断、热插拔、debug 这些工业级特性。
骨架,就是 ch11 你演化出来的 base + ops,放大成工业级的样子。
16.6 一个驱动跨所有芯片:at24 案例
Linux 内核里有一个文件 drivers/misc/eeprom/at24.c。I2C EEPROM 的驱动。一个文件,支持几十种 EEPROM 型号(AT24C01、AT24C02、24C16、24C512……),跑在任何家 SoC 上,只要芯片厂的 I2C platform 层做好了。
你不需要自己写 EEPROM 驱动。社区已经写好了。同样:I2C 扩展 IO、SPI 屏幕驱动、PWM 电机控制器,大部分都有现成的内核驱动。
你以为自己要写的那些设备驱动,多数是在反复造轮子。
没有 platform 层的时候,你给每家 SoC 写一份 EEPROM 驱动。有了 platform 层,一份 at24.c,到处用。

16.7 Platform 层你不用自己写
但 platform 层本身要不要写?
不需要。
Linux 内核:半导体厂商已经把 platform 层写好了。你买一颗 SoC,BSP 包里 GPIO / I2C / SPI / UART,全部 ready。
RT-Thread 也一样:PIN 设备、I2C 设备、SPI 设备,统一框架,芯片厂适配。
Zephyr 同样:device tree binding + driver model,芯片厂提供 gpio_dw.c / i2c_nrfx_twim.c 这种文件。
所以你的项目只需要关心:
- 设备驱动层(多数从社区拿现成的)
- 应用层(你自己写)
Platform 层?芯片厂做好了。设备驱动?大部分社区已经有了。
这就是为什么用 Linux 开发比裸机 MCU 还简单,不是 Linux 简单,是有人替你把难的部分做完了。前提是你得理解这种分层设计,知道每一层解决什么问题。

16.8 AI 时代
有人说 AI 时代不需要学架构了,AI 能写代码。
AI 能帮你写 gpio_on,能帮你写 platform 层适配,能从零生成一个 I2C 驱动。
但决定“这里该用 ops 表还是 if-else“、“这层该抽象到什么程度”、“这个接口够不够稳定”,这一类问题不是 AI 给你答案,是你给 AI 答案,AI 才能照你的骨架往下写。
而且 AI 是看你的代码仓库学习你的风格的。你的代码有分层,AI 输出就有分层。你的代码是一坨,AI 输出也是一坨。
这就是 AI 时代你的核心竞争力,你的架构能力,决定了 AI 能帮你放大多少。

16.9 视频里没讲透的几个细节
16.9.1 trace_gpio_value 这一行干什么
第 16.5 节贴的 gpiod_set_raw_value_commit 里有一行:
trace_gpio_value(desc_to_gpio(desc), 0, value);
这是内核 ftrace 框架的 trace 埋点。打开 ftrace 之后,每一次 GPIO 写入都会被记录到 trace buffer,开发期 debug 极方便。生产构建里 trace 框架可以彻底关掉,那一行编译期消失。
这是 Linux 内核常见的“埋点 + 可关闭“模式。本书 ch14 讲 assert 时提过类似思路(assert 在 release 关掉零开销)。
16.9.2 EXPORT_SYMBOL_GPL 是什么
gpiod_set_value 函数末尾这一行:
EXPORT_SYMBOL_GPL(gpiod_set_value);
它做了两件事:
- 把
gpiod_set_value这个符号加到内核的导出符号表,让 loadable module 能链接到。 - 标记
_GPL,意思是只有 GPL 兼容许可证的 module 才能用。
这一招和下一章要讲的注册机制同源,都是用 __attribute__((section())) 把信息塞进特殊段,运行时遍历。下一章你会看到完整玩法。
16.9.3 RT-Thread / Zephyr 同源
打开 RT-Thread components/drivers/include/drivers/pin.h:
struct rt_pin_ops {
void (*pin_mode)(struct rt_device *device, rt_base_t pin, rt_uint8_t mode);
void (*pin_write)(struct rt_device *device, rt_base_t pin, rt_uint8_t value);
rt_int8_t (*pin_read)(struct rt_device *device, rt_base_t pin);
rt_err_t (*pin_attach_irq)(struct rt_device *device, rt_int32_t pin,
rt_uint32_t mode, void (*hdr)(void *args), void *args);
rt_err_t (*pin_detach_irq)(struct rt_device *device, rt_int32_t pin);
rt_err_t (*pin_irq_enable)(struct rt_device *device, rt_base_t pin,
rt_uint32_t enabled);
rt_base_t (*pin_get)(const char *name);
};
Zephyr 的 gpio_driver_api:
struct gpio_driver_api {
int (*pin_configure)(const struct device *port, gpio_pin_t pin, gpio_flags_t flags);
int (*port_get_raw)(const struct device *port, gpio_port_value_t *value);
int (*port_set_masked_raw)(const struct device *port, gpio_port_pins_t mask,
gpio_port_value_t value);
/* ... */
};
字段名稍有不同,机制完全一致。三个项目(Linux 内核、RT-Thread、Zephyr)都是 C 写的,都用 ops 表 + 函数指针。读完本书你打开任何一个项目源码不会陌生。
16.9.4 device tree:怎么把硬件树挂上 ops 表
这个细节本章不展开。简单说:device tree 是 Linux / Zephyr 用来描述硬件拓扑的文本文件(比如 “GPIO bank A 在地址 0x40020000,连了 16 个引脚”)。启动期 device tree 被解析成 struct device 节点,每个节点根据 compatible 字符串找到对应的驱动,挂上 ops 表。
device tree 解决的是“如何把 ops 表上挂的 chip 实例和实际硬件连起来“。本章你只要知道:注册(从静态全局 → device tree 动态)这一步,和 ops 表本身的机制无关。
16.9.5 不要把 HAL 库当 platform 层
ST 的 HAL 库(HAL_GPIO_WritePin 那一套)经常被人当作 platform 抽象的例子。其实不是。HAL 库是“绑死 STM32 一家 + 函数式包装“,HAL_GPIO_WritePin(GPIOA, ...) 里的 GPIOA 是 STM32 寄存器布局的 typedef,绑得死死的。换到瑞萨 RA 上 GPIOA 这个符号都不存在。
真正的 platform 层是抽象到“任何 SoC 都能实现“的程度。ops 表才是 platform 层的标准形态。HAL 库是 platform 层下面、绑死单家的实现,你用的时候只是 platform 层的一个具体子类。
16.10 你现在的代码在 STM32 / Linux 上长什么样
ch16 是工程哲学章,本章 STM32 端没有特殊代码片段,你已经会的 ch15 platform_ops 就是 STM32 端的样子。
如果你想把本章 pc/ 里山寨的 gpio_chip 框架移植到 STM32 裸机上,做法是:
- 把
vendor_a_set里的 printf 替换成真实的 BSRR 写入。 - 启动期(或下一章的 initcall)调一次
gpiochip_add(&vendor_a_chip)。 - led 驱动一行不改。
效果就是“一份 leds-gpio.c 跑在不同 SoC 上“,这就是 Linux 内核的工作模式。详见 oop-in-c/code/16-linux-style/platform-mcu/stm32/。
Linux 用户态视角是另一档代码: oop-in-c/code/16-linux-style/linux-driver/userspace/ 给一份 libgpiod 最小例——应用层一行 gpiod_line_set_value(line, 1),跨进程 syscall 进内核之后跑的就是本章 16.5 节那一套 gc->set 多态 dispatch(真身,不是山寨)。pc/ 是教学版骨架,linux-driver/userspace/ 是产品上每天跑的应用层调用形态。
LED 这种通用外设, Linux 内核 mainline 已经有 drivers/leds/leds-gpio.c 标准内核驱动 (上千种板子用过), 这本书不再重写一份“教学用 LED 内核驱动“ (过度演示). 真要写新硬件的内核驱动, 先看 § 16.14 三步判断流程。
Linux 内核侧的“snippet“就是内核源码本身(如何获取内核源码做本地参考见附录 D,下面是 v6.6 LTS 的关键路径):
include/linux/gpio/driver.h第 415 行:struct gpio_chip真身drivers/gpio/gpiolib.c第 3245 行:gpiod_set_valuedrivers/misc/eeprom/at24.c:一个文件跨所有 SoC 的 EEPROM 驱动include/linux/container_of.h第 18 行:container_of真身
读完本章 pc/ 山寨版再去读这几个内核源文件,你会发现“原来就是这一招“。
16.11 工业代码里的对照
工业控制板项目里没有 Linux 内核(裸机 + RTOS),但用的是同一套思路:
/* drivers/gpio/gpio_chip.h */
struct gpio_chip {
const char *name;
const struct gpio_chip_ops *ops;
uint32_t base;
uint32_t ngpio;
};
struct gpio_chip_ops {
int (*request)(struct gpio_chip *gc, uint32_t offset);
void (*set)(struct gpio_chip *gc, uint32_t offset, bool value);
bool (*get)(struct gpio_chip *gc, uint32_t offset);
};
5 套产品,3 款主控芯片,driver 模块(led / motor / encoder / sensor / eeprom)跨产品共享。每款芯片提供一份 gpio_chip 实现 + 注册一次 gpiochip_add。
跟 Linux 内核 90% 一致。这套架构是“工业总结的最佳工程实践“,不是某个项目独创的。
16.12 完整源码清单
把下面的代码块分别保存到对应的文件,目录结构和 oop-in-c/code/16-linux-style/pc/ 一致。make && ./demo 即可跑通。
文件 1:main.c(43 行)
启动入口。注册两家芯片,然后用同一份 leds-gpio 驱动接口分别点亮两家芯片上的灯。
/* SPDX-License-Identifier: MIT */
/*
* main.c - 山寨内核启动 + 同一份 leds-gpio 跑两家芯片
*/
#include "gpio_chip.h"
#include <stdio.h>
#include <stdlib.h>
void vendor_a_probe(void);
void vendor_b_probe(void);
void led_gpio_brightness_set(struct gpio_desc *desc, int value);
int main(void)
{
printf("=========================================\n");
printf(" ch16 - linux-style gpio subsystem\n");
printf("=========================================\n");
/* 启动期注册 chip。真实内核里走 module_init。 */
vendor_a_probe();
vendor_b_probe();
/* leds-gpio 驱动通过 chip + offset 拿到 desc */
struct gpio_desc *led_red = gpio_get_desc("vendorA-gpio", 5);
struct gpio_desc *led_green = gpio_get_desc("vendorB-gpio", 2);
printf("\n--- leds-gpio drives both chips ---\n");
led_gpio_brightness_set(led_red, 1);
led_gpio_brightness_set(led_green, 1);
led_gpio_brightness_set(led_red, 0);
led_gpio_brightness_set(led_green, 0);
printf("\n>>> same gpiod_set_value() dispatches to two vendors <<<\n");
free(led_red);
free(led_green);
printf("\nPress Enter to exit...\n");
getchar();
return 0;
}
文件 2:leds_gpio.c(24 行)
设备驱动层。它只调一行 gpiod_set_value,不知道也不需要知道底下是哪家 SoC 的 GPIO 控制器。这就是真实内核 drivers/leds/leds-gpio.c 的山寨版。
/* SPDX-License-Identifier: MIT */
/*
* leds_gpio.c - 内核里的 leds-gpio 驱动山寨版
*
* 真实内核版定义在 drivers/leds/leds-gpio.c。它就调一行 gpiod_set_value,
* 不关心底下是哪家 SoC 的 GPIO 控制器。
*
* 这就是 Linux 内核驱动作者的世界:通过 ops 表 + 抽象接口,写一份代码
* 服务所有芯片。
*/
#include "gpio_chip.h"
#include <stdio.h>
void led_gpio_brightness_set(struct gpio_desc *desc, int value)
{
/*
* 这一行内部走 gc->set , 多态 dispatch。
* vendorA 走 vendor_a_set,vendorB 走 vendor_b_set。
* 这个驱动不知道也不需要知道。
*/
gpiod_set_value(desc, value);
}
文件 3:gpio_chip.h(49 行)
父类接口。struct gpio_chip 是每家芯片要实现的“模板“,struct gpio_desc 是 consumer 拿到的句柄。
/* SPDX-License-Identifier: MIT */
/*
* gpio_chip.h - "山寨" 一份 Linux 内核 gpio_chip
*
* 把 ch15 的 platform_ops 改个名字、改成"按 chip 分组"的形态,
* 你就得到了一份和 Linux 内核 GPIO 子系统 90% 相像的接口。
*
* 真实内核版定义在 include/linux/gpio/driver.h 第 415 行起,
* 字段比这里多得多(中断、热插拔、debug 等),但骨架就是这样。
*/
#ifndef GPIO_CHIP_H
#define GPIO_CHIP_H
#include <stdint.h>
#include <stdbool.h>
struct gpio_chip {
const char *label;
uint32_t base;
uint32_t ngpio;
int (*request)(struct gpio_chip *gc, unsigned int offset);
void (*free)(struct gpio_chip *gc, unsigned int offset);
int (*direction_output)(struct gpio_chip *gc,
unsigned int offset, int value);
int (*get)(struct gpio_chip *gc, unsigned int offset);
void (*set)(struct gpio_chip *gc, unsigned int offset, int value);
void *driver_data; /* 给具体 chip 实现挂自己的 context */
};
/* 内核态 gpio consumer 接口(简化版) */
struct gpio_desc {
struct gpio_chip *gc;
unsigned int offset;
};
void gpiod_set_value(struct gpio_desc *desc, int value);
int gpiod_get_value(struct gpio_desc *desc);
/* 注册 chip(真正内核里叫 gpiochip_add_data) */
int gpiochip_add(struct gpio_chip *gc);
/* 通过 chip + offset 拿 desc(真正内核走 device tree) */
struct gpio_desc *gpio_get_desc(const char *chip_label, unsigned int offset);
#endif /* GPIO_CHIP_H */
文件 4:gpiolib.c(66 行)
“内核“侧的注册表 + dispatch。gpiod_set_value 最后一行 desc->gc->set(...) 就是 16.5 节内核源码的山寨版。
/* SPDX-License-Identifier: MIT */
/*
* gpiolib.c - "山寨" 内核 gpiolib 的最小内核态
*
* 注册一组 gpio_chip,通过 desc 反向找到 chip,调 chip->set / chip->get。
* 真实内核版见 drivers/gpio/gpiolib.c 第 3245 行 gpiod_set_value。
*
* 内核里那段关键调用是这样:
* gpiod_set_value -> gpiod_set_value_nocheck -> gpiod_set_raw_value_commit
* -> gc->set(gc, gpio_chip_hwgpio(desc), value);
*
* 最后一行 gc->set 就是你 ch11 学的多态 dispatch。
*/
#include "gpio_chip.h"
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#define MAX_CHIPS 8
static struct gpio_chip *s_chips[MAX_CHIPS];
static int s_num_chips;
int gpiochip_add(struct gpio_chip *gc)
{
if (s_num_chips >= MAX_CHIPS)
return -1;
s_chips[s_num_chips++] = gc;
printf("[gpiolib] chip '%s' registered (base=%u, ngpio=%u)\n",
gc->label, gc->base, gc->ngpio);
return 0;
}
struct gpio_desc *gpio_get_desc(const char *chip_label, unsigned int offset)
{
for (int i = 0; i < s_num_chips; i++) {
if (strcmp(s_chips[i]->label, chip_label) == 0) {
struct gpio_desc *d = malloc(sizeof(*d));
d->gc = s_chips[i];
d->offset = offset;
return d;
}
}
return NULL;
}
void gpiod_set_value(struct gpio_desc *desc, int value)
{
if (!desc || !desc->gc)
return;
/* 这一行是 Linux 内核 drivers/gpio/gpiolib.c L3057 的山寨版:
* gc->set(gc, gpio_chip_hwgpio(desc), value);
* 把 desc->offset 当 hwgpio 直接传过去。
*/
desc->gc->set(desc->gc, desc->offset, value);
}
int gpiod_get_value(struct gpio_desc *desc)
{
if (!desc || !desc->gc)
return -1;
return desc->gc->get(desc->gc, desc->offset);
}
文件 5:gpio_vendor_a.c(68 行)
厂商 A 的 gpio_chip 实现。每家芯片厂提供一份这样的文件,内核里对应 drivers/gpio/gpio-rockchip.c / gpio-mxc.c 这一族。
/* SPDX-License-Identifier: MIT */
/*
* gpio_vendor_a.c - 厂商 A 的 gpio_chip 驱动
*
* 假装这是某家 SoC 的 GPIO 控制器实现。把 chip->set 指向自己的
* 寄存器操作。在 PC 上用 printf 模拟。
*
* 真实 Linux 内核里的等价物:drivers/gpio/gpio-mxc.c、gpio-rockchip.c
* 等等。每家芯片厂提供一份这样的文件。
*/
#include "gpio_chip.h"
#include <stdio.h>
static int vendor_a_request(struct gpio_chip *gc, unsigned int offset)
{
printf(" [vendorA] request offset=%u (write reg PORT_EN)\n",
offset);
(void)gc;
return 0;
}
static void vendor_a_free(struct gpio_chip *gc, unsigned int offset)
{
printf(" [vendorA] free offset=%u\n", offset);
(void)gc;
}
static int vendor_a_direction_output(struct gpio_chip *gc,
unsigned int offset, int value)
{
printf(" [vendorA] direction_output offset=%u (write reg DIR)\n",
offset);
(void)gc;
(void)value;
return 0;
}
static int vendor_a_get(struct gpio_chip *gc, unsigned int offset)
{
(void)gc;
(void)offset;
return 0;
}
static void vendor_a_set(struct gpio_chip *gc, unsigned int offset, int value)
{
printf(" [vendorA] set offset=%u value=%d (DR_REG <- 0x%08X)\n",
offset, value, value ? (1u << offset) : 0);
(void)gc;
}
static struct gpio_chip vendor_a_chip = {
.label = "vendorA-gpio",
.base = 0,
.ngpio = 32,
.request = vendor_a_request,
.free = vendor_a_free,
.direction_output = vendor_a_direction_output,
.get = vendor_a_get,
.set = vendor_a_set,
};
void vendor_a_probe(void)
{
gpiochip_add(&vendor_a_chip);
}
文件 6:gpio_vendor_b.c(66 行)
厂商 B 的 gpio_chip 实现。同样的接口,不同的寄存器风格(BSRR 模式,类似 STM32)。
/* SPDX-License-Identifier: MIT */
/*
* gpio_vendor_b.c - 厂商 B 的 gpio_chip 驱动
*
* 同样的接口,不同的内部实现(不同寄存器布局)。这一份是为了演示
* 同一份 gpiod_set_value 在不同芯片下走到不同实现。
*/
#include "gpio_chip.h"
#include <stdio.h>
static int vendor_b_request(struct gpio_chip *gc, unsigned int offset)
{
printf(" [vendorB] request offset=%u (clear reg LOCK)\n", offset);
(void)gc;
return 0;
}
static void vendor_b_free(struct gpio_chip *gc, unsigned int offset)
{
printf(" [vendorB] free offset=%u\n", offset);
(void)gc;
}
static int vendor_b_direction_output(struct gpio_chip *gc,
unsigned int offset, int value)
{
printf(" [vendorB] direction_output offset=%u (set reg MODE)\n",
offset);
(void)gc;
(void)value;
return 0;
}
static int vendor_b_get(struct gpio_chip *gc, unsigned int offset)
{
(void)gc;
(void)offset;
return 0;
}
static void vendor_b_set(struct gpio_chip *gc, unsigned int offset, int value)
{
/* 厂商 B 用 SET / CLR 两个寄存器(类似 STM32 BSRR) */
uint32_t reg = value ? (1u << offset) : (1u << (offset + 16));
printf(" [vendorB] set offset=%u value=%d (BSRR <- 0x%08X)\n",
offset, value, reg);
(void)gc;
}
static struct gpio_chip vendor_b_chip = {
.label = "vendorB-gpio",
.base = 32,
.ngpio = 16,
.request = vendor_b_request,
.free = vendor_b_free,
.direction_output = vendor_b_direction_output,
.get = vendor_b_get,
.set = vendor_b_set,
};
void vendor_b_probe(void)
{
gpiochip_add(&vendor_b_chip);
}
文件 7:Makefile(19 行)
# Makefile - ch16 linux-style (PC)
CC = gcc
CFLAGS = -Wall -Wextra -std=c99
TARGET = demo
SRCS = main.c gpiolib.c gpio_vendor_a.c gpio_vendor_b.c leds_gpio.c
.PHONY: all clean run
all: $(TARGET)
$(TARGET): $(SRCS)
$(CC) $(CFLAGS) -o $(TARGET) $(SRCS)
run: $(TARGET)
./$(TARGET)
clean:
rm -f $(TARGET) $(TARGET).exe
跑一遍
cd oop-in-c/code/16-linux-style/pc
make
./demo
期望输出
=========================================
ch16 - linux-style gpio subsystem
=========================================
[gpiolib] chip 'vendorA-gpio' registered (base=0, ngpio=32)
[gpiolib] chip 'vendorB-gpio' registered (base=32, ngpio=16)
--- leds-gpio drives both chips ---
[vendorA] set offset=5 value=1 (DR_REG <- 0x00000020)
[vendorB] set offset=2 value=1 (BSRR <- 0x00000004)
[vendorA] set offset=5 value=0 (DR_REG <- 0x00000000)
[vendorB] set offset=2 value=0 (BSRR <- 0x00040000)
>>> same gpiod_set_value() dispatches to two vendors <<<
led_gpio_brightness_set 这个驱动函数对两个 LED 调同一行 gpiod_set_value。红灯走 vendorA 的寄存器(DR_REG),绿灯走 vendorB 的寄存器(BSRR 风格)。驱动一行不改。
这就是 Linux 内核驱动作者每天的工作模式。
16.13 不只是 Linux:Zephyr / RT-Thread 也是同款
ch16 前面一整章给你看的是 Linux 内核 gpio_chip 子系统. 读到这里很自然要问: 那其他 RTOS 呢, 是不是只有 Linux 这么干. 不是. 凡是带 device subsystem 的 RTOS 都是同款, 内核已经把 platform 层做完, 应用层别再抽.
Zephyr 用 device tree binding + driver model, 编译期从 .dts 文件生成 device 实例, 应用层拿到一个 const struct device * 直接用:
/* Zephyr 应用层调 GPIO·内核已经做完 platform 抽象·应用层直接用 */
const struct device *gpio = DEVICE_DT_GET(DT_NODELABEL(gpio0));
gpio_pin_configure(gpio, 17, GPIO_OUTPUT);
gpio_pin_set(gpio, 17, 1);
gpio_pin_set 内部走 gpio_driver_api 这张 ops 表 dispatch 到 gpio_nrfx.c / gpio_stm32.c 之类的具体芯片实现. 你 ch16 学的 gc->set 多态 dispatch 一字不差, 字段名换成 port_set_masked_raw 而已.
RT-Thread 走 rt_device_register / rt_device_find / rt_device_open / rt_device_read/write/control 一套接口. PIN / serial / i2c / spi 各自一个子类, 父类是 struct rt_device. 应用层直接调高层 API:
/* RT-Thread 应用层·rt_pin_write 内部走 ops dispatch·和 ch15 教学版一字不差 */
rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);
rt_pin_write(LED_PIN, PIN_HIGH);
rt_pin_write 内部走 struct rt_pin_ops (16.9.3 节贴过), pin_write 函数指针落到具体 SoC 的实现. 和这本书 ch15 自抽的 platform 层骨架一字不差, 只是字段更全.
NuttX 也一样. 它走 POSIX 风格的 character device + driver_model. GPIO 挂 /dev/gpioN 节点, 应用层 open / write / ioctl 就够, 内核底下走 driver registration. 跟 Linux 用户态接口同款.
把四种环境拉平对照:
| 环境 | platform 抽象层 | 谁做的 |
|---|---|---|
| 裸机 + HAL | 必须自抽 | 你自己 (ch15 / 附录 B 教的) |
| 带 device subsystem 的 RTOS (Zephyr / RT-Thread / NuttX) | 禁自抽 | 内核做完, 直接用 |
| Linux 用户态 | 禁自抽 | 内核做完, 直接 libgpiod (附录 C 实战) |
| Linux 内核态驱动 | 禁自抽 | 用 driver model (本章 16.5 节讲的 gpio_chip) |
裸机那一行是 ch15 + 附录 B 的主战场, 没人帮你, 你必须自抽. 中间两行是这一节的重点, 内核已经把 platform 层做完, 应用层 / 业务层再套一层 platform_pin → rt_pin_write 就是过度封装. 这种代码评审里很常见, 第一眼看像架构师, 仔细一看是把内核已经抽好的接口又包了一遍, 没拦下任何变化, 反而多了一层没意义的 indirection.
把 RT-Thread 应用代码套一层 platform_pin → rt_pin_write 和把 Linux 用户态套一层 platform_pin → libgpiod_line_set_value 是同一种错. 内核已经做完的事别重做.
这本书 ch15 教你怎么自抽 platform 层. 它的反面同样重要: 看到内核已经抽好的环境 (Linux / Zephyr / RT-Thread / NuttX), 别再抽. 自抽 platform 不是工业级的标志, 会判断什么时候不抽才是. 这是 ch15 / ch16 / 附录 B / 附录 C 四个章节合起来想送给你的工程判断力.
Zephyr driver framework 完整工程·照着 5 分钟跑通·见附录 B。
16.14 应用层驱动 vs 内核层驱动:怎么选
上一节讲清楚了“内核已做完别再抽“. 但 Linux 这一档环境上还有第二个问题: 你要写一个新硬件的驱动, 写在哪一层. 应用层 (libgpiod / sysfs / iio / spidev / i2c-dev) 还是内核层 (driver model / kernel module). 工程师面试聊到这一关, 一半人答不清楚. 这一节给你一份判断表.
先把两种位置的差别拉平来看:
| 维度 | 应用层 (libgpiod / sysfs / iio / spidev) | 内核层 (driver model / kmod) |
|---|---|---|
| 开发难度 | 低 (gdb / strace / printf, 崩了重启进程) | 高 (KGDB / printk / qemu, 崩了 kernel panic) |
| 故障影响 | 进程挂, 系统不挂 | 内核挂, 全挂 |
| 实时性 | 受用户态调度, 有 jitter | ISR / softirq, 延迟低 |
| 性能 | syscall + 数据拷贝 | 零拷贝 / DMA, 直接 ioremap |
| 多进程共享 | 要 IPC (mmap / dbus / socket) | 内核里多进程透明共享 |
| Licensing | 可闭源 (你自己产品的 license) | GPL (内核接口要求) |
| 部署 | 拷贝二进制就行 | 重编内核, 或 DKMS 动态模块 |
7 个维度里, 前三行决定 “能不能写在应用层”, 后四行决定 “写在应用层划不划算”. 对照表硬记没意思, 给你一个三步判断流程, 真做项目的时候按顺序问:
第一步: Linux 内核已经有这一颗硬件的驱动, 而且接口够用. 直接用, 别写. 99% 的 GPIO / I2C / SPI / UART / 温度传感器 / 加速度计在内核 mainline 里已经有, 接口齐, 你写完一份新驱动, 维护一辈子. 内核里已有的, 直接 apt install libgpiod-dev + gpiod_line_set_value, 完事.
第二步: 内核没有, 或者厂家给的源码不开源 (做不到合并 mainline). 这时才轮到 “应用层 OR 内核层”. 看四件事:
- 中断密度: 高频 (> 1 kHz) + 抖动敏感, 用户态调度顶不住, 内核层. 低频 + 抖动可容忍, 应用层够.
- 延迟要求: us 级, 内核层. ms 级, 应用层够.
- 多进程并发访问: 多个进程要共享同一颗设备, 内核层 (driver 提供 device 节点, 多进程 open 同一个 fd). 单进程独占, 应用层够.
- 数据吞吐: > 100 MB/s + 零拷贝刚需, 内核层 + DMA. 否则应用层 syscall 也跑得动.
第三步 (跨平台兜底): 这是 MCU 不是 Linux 跑的硬件, 资源紧张到上不了完整内核, 但仍想要 device + driver 这套思想. 答案不是 “在 FreeRTOS 上自抽一份 platform 层”, 是 clone Zephyr 或 RT-Thread, 把它们的 driver framework 拔下来直接用. driver 注册 + ops 表 + device tree 解析人家写了十几年, 你三周自抽的版本和它没法比. 完整论述见 ch15 § 15.16 给真实工程的建议.
举一个常见例子: 你要给一颗外接温度传感器写驱动. 走应用层还是内核层?
- 中断密度低 (温度采样 1 Hz / 10 Hz 就够), 延迟不敏感 (温度变化慢), 单进程独占 (一个采集任务读), 数据吞吐小. 四件事全往应用层这边倒.
- 应用层版本:
int fd = open("/dev/i2c-1"); ioctl(fd, I2C_SLAVE, 0x48); read(fd, buf, 2);几十行代码, gdb 调试, 崩了重启进程, 闭源没问题. 半天搞定. - 内核层版本: 写一份 i2c_driver, 注册 hwmon device, 走 sysfs 出温度. 一千行代码, KGDB 调试, 崩了 kernel panic, 必须 GPL 出来. 三周搞定.
你猜结果. 工业项目里 99% 的温度传感器走应用层. 能在应用层做的事就不要进内核, 这是 Linux 内核社区自己的纪律, 也是工程判断力.
什么时候真要写内核驱动? 一个反例: 高速雷达 ADC, 1 MSPS 采样率 + DMA + ms 级延迟容忍上限. 这种应用层抗不住调度抖动, syscall + 拷贝吃不消, 必须写内核驱动用零拷贝 mmap / iio_buffer 暴露给用户态. 这一档项目一年遇不到几个.
判断三句话总结:
- 内核已有内核驱动且满足 -> 直接用 libgpiod / iio / spidev, 不写.
- 没有 -> 按延迟 / 中断密度 / 多进程需求选位置, 默认应用层, 上面四件有一件命中再上内核层.
- MCU 资源紧仍想要这套 -> clone Zephyr / RT-Thread 拔现成框架, 别自抽.
写驱动的本事不在于会写, 在于会判断 “这一层该不该有”. 工业代码里最贵的不是开发时间, 是 5 年后还能不能维护得动. 走对位置, 维护成本砍 10 倍.
Linux 用户态写应用 + 自己写一个 platform driver 模块的完整流程·见附录 C·你会亲手在 Raspberry Pi 4B 上跑一个 leds-status.ko。
16.15 视频回放
下一章
驱动注册这一步在本章 main 里手写:vendor_a_probe(); vendor_b_probe();。Linux 内核几千个驱动是怎么注册的?也是手写一长串调用?
不是。Linux 内核的 main 函数(你叫它 start_kernel)从来不改。加一个新驱动只写一行 module_init(my_init),启动期自动挂上来。
下一章揭穿这一招:链接器收卡片,启动时按号码拨。