第 15 章 · 换硬件不改应用 · OOP 完整框架
配套代码:oop-in-c/code/15-platform/
封装、继承、多态、向上转型、向下转型、纯虚 / 选填 / 接口,C 里做 OOP 的全部武器你都见过了。
这一章不引入任何新概念。把武器全部组装起来,演示一套完整的 LED 框架:父类 / 子类 / 板级 / 应用四层,每层一个职责,每层只调下一层。同一份应用代码挂着 GPIO + PWM + I2C 三种硬件混搭的 LED,应用层 grep 拿不到任何硬件字样。换硬件方案,应用 0 修改。
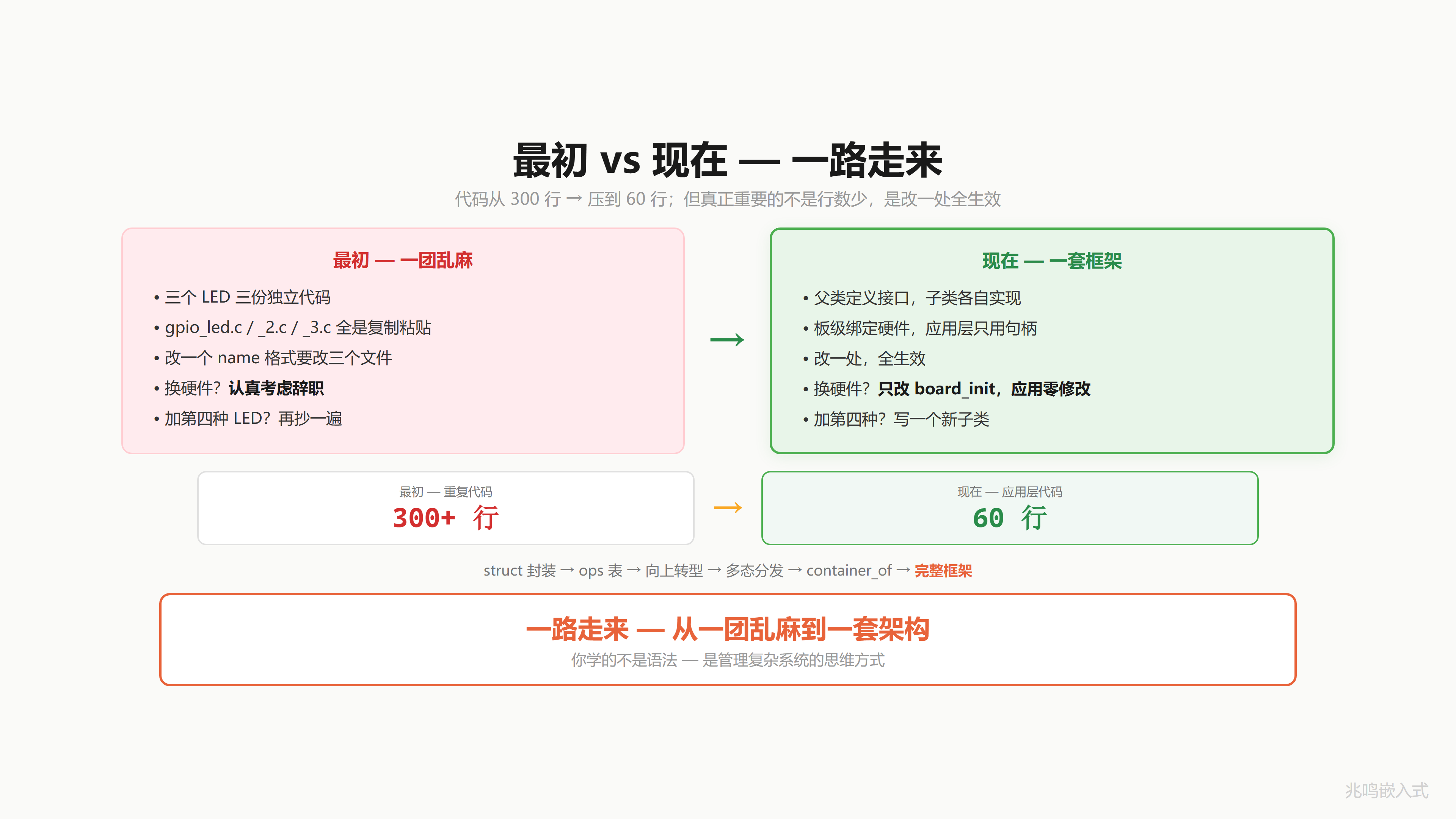
最初你一份代码控一盏灯、三盏灯三份代码。现在 300 多行复制粘贴的代码,被压到应用层 60 行。一路走来,从一团乱麻到一套架构。
15.1 四层架构
打开配套代码 oop-in-c/code/15-platform/pc/,8 个文件按调用方向从上往下分四层:
应用层 app.h, app.c alarm_blink / status_indicate / power_on_test
子类层 led_gpio.{h,c} / led_pwm.{h,c} / 每个子类一对独立文件,
led_i2c.{h,c} container_of 反推
父类层 led_base.h, led_base.c 父类层公开头: 字段集 + ops 表 + 共有 init
+ 父类统一接口 (必填 + 选填分发)
平台层 platform_init.c 把 PC 后端 platform_pwm/i2c ops 注册进 dispatcher
板级层 leds.h, led_board_init.c LED 实例化 + 向上转型, 唯一认识 LED 硬件的文件
底下还有一份 common/platform_pc.c,提供 4 个 GPIO 封装函数(platform_gpio_init / write / read / deinit),从 ch01 起整本书一字不变。STM32 / Linux 真机上换成对应实现,上面 4 层一字不动。
每一层只关心自己。每一层只调下一层。

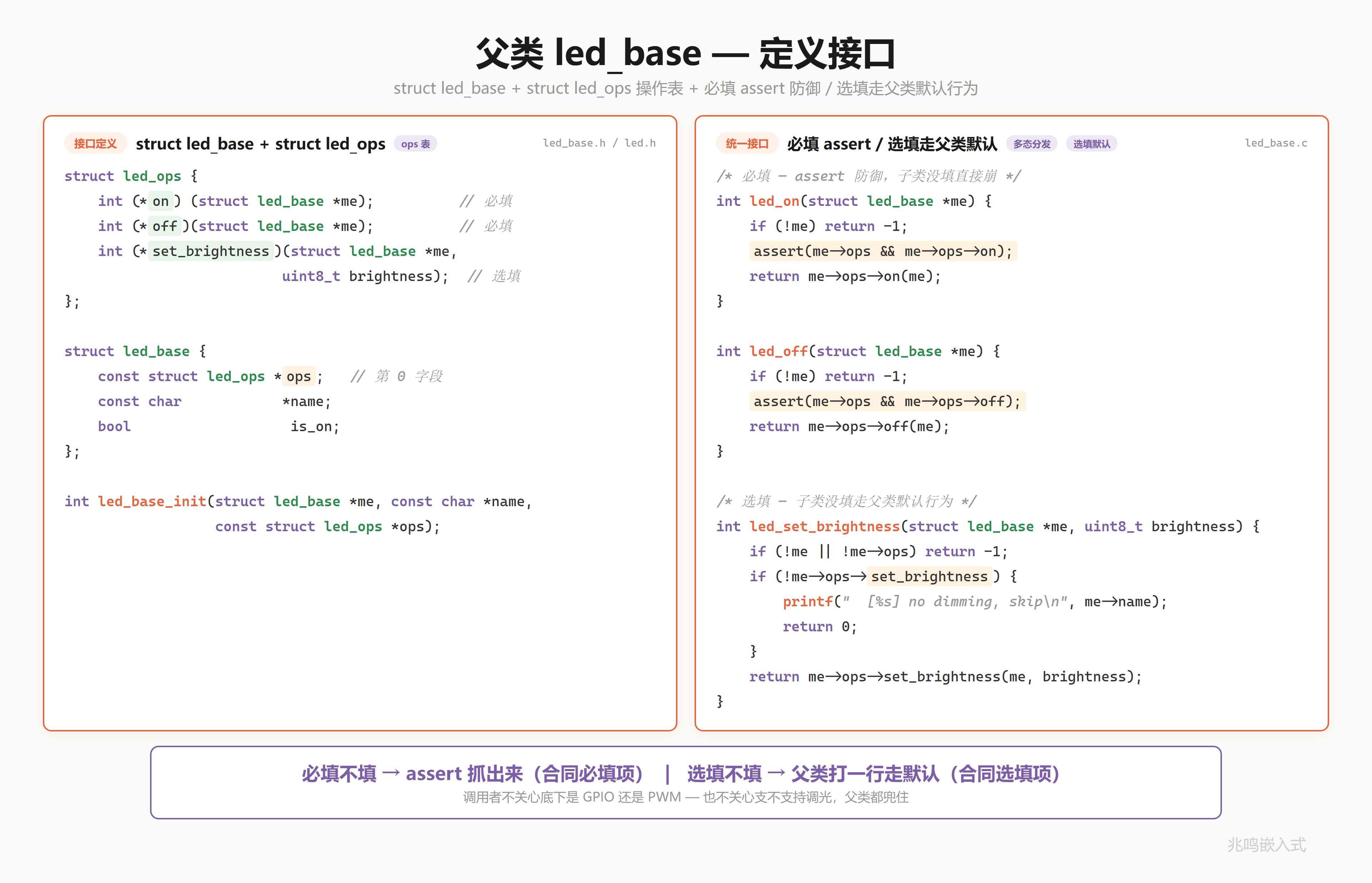
15.2 父类层:led_base + 必填选填
父类层一份 led_base.h 一份 led_base.c,从 ch10 / ch11 一脉相承:父类只关心共有数据(ops + name + is_on)和共有 init,把“我用哪张 ops 表“作为参数传进来一次填好。
/* led_base.h - 父类层公开头 */
struct led_base;
struct led_ops {
int (*on)(struct led_base *me); /* 必填 */
int (*off)(struct led_base *me); /* 必填 */
int (*set_brightness)(struct led_base *me, /* 选填 */
uint8_t brightness);
};
struct led_base {
const struct led_ops *ops; /* 第一个字段, 对象起始地址处 */
const char *name;
bool is_on;
};
int led_base_init(struct led_base *me, const char *name,
const struct led_ops *ops);
/* 父类统一接口 - 实现在 led_base.c, 所有子类共用 */
int led_on(struct led_base *me);
int led_off(struct led_base *me);
int led_set_brightness(struct led_base *me, uint8_t brightness);
三个字段:name(每盏灯一个字符串名字,打日志用)、is_on(当前开关状态,父类记账)、ops(指向子类的 ops 表)。这三个字段从 ch11 多态那一章定型之后再没动过。
led_base_init 是父类共有 init,子类的 init 第一行调它一次,把对应的 const ops 表交给父类存到 me->ops:
/* led_base.c */
int led_base_init(struct led_base *me, const char *name,
const struct led_ops *ops)
{
if (!me || !name || !ops)
return -1;
me->ops = ops;
me->name = name;
me->is_on = false;
return 0;
}
ops 表的 set_brightness 槽位采用 ch14 的“必填 + 选填“混合策略,对应的父类统一接口分两种处理:
/* led_base.c */
int led_on(struct led_base *me)
{
if (!me)
return -1;
/* 必填: 子类必须实现 on. assert 抓到忘填的子类立刻 abort 给行号. */
assert(me->ops && me->ops->on &&
"led_on: subclass must implement on()");
return me->ops->on(me);
}
int led_set_brightness(struct led_base *me, uint8_t b)
{
if (!me || !me->ops)
return -1;
if (!me->ops->set_brightness) { /* 选填, 父类提供默认行为 */
printf(" [%s] no dimming, skip (brightness=%u)\n",
me->name, (unsigned)b);
return 0;
}
return me->ops->set_brightness(me, b);
}
on / off 必填,对应 C++ 纯虚函数,子类不实现 assert 立刻报错。set_brightness 选填,对应 C++ 带默认行为的虚函数,子类不实现父类走默认(GPIO 灯没法调光)。同一个父类接口里,必填和选填两种做法同时出现。这就是 ch14 的精确兑现。
ops 表字段集的演化链条:ch07-ch11 用
toggle槽位演示 ops 表多态分发;ch12 主题向上转型,表收缩成on / off两字段聚焦主线;ch13 起加入set_brightness为 ch14 § 14.3 选填策略埋伏笔;ch14 / ch15 沿用三件套(on/off必填 +set_brightness选填)。每章保留一个槽位用于演化,是这本书代码包的纪律。工业项目里 ops 字段往往写成
const struct led_ops * const ops(指针本身也 const,构造期一次填好之后不允许改),靠 designated initializer 在子类构造期一次性绑定。本书为了渐进教学走“led_base_init内部一字一字赋值“的简化版,机制等价。
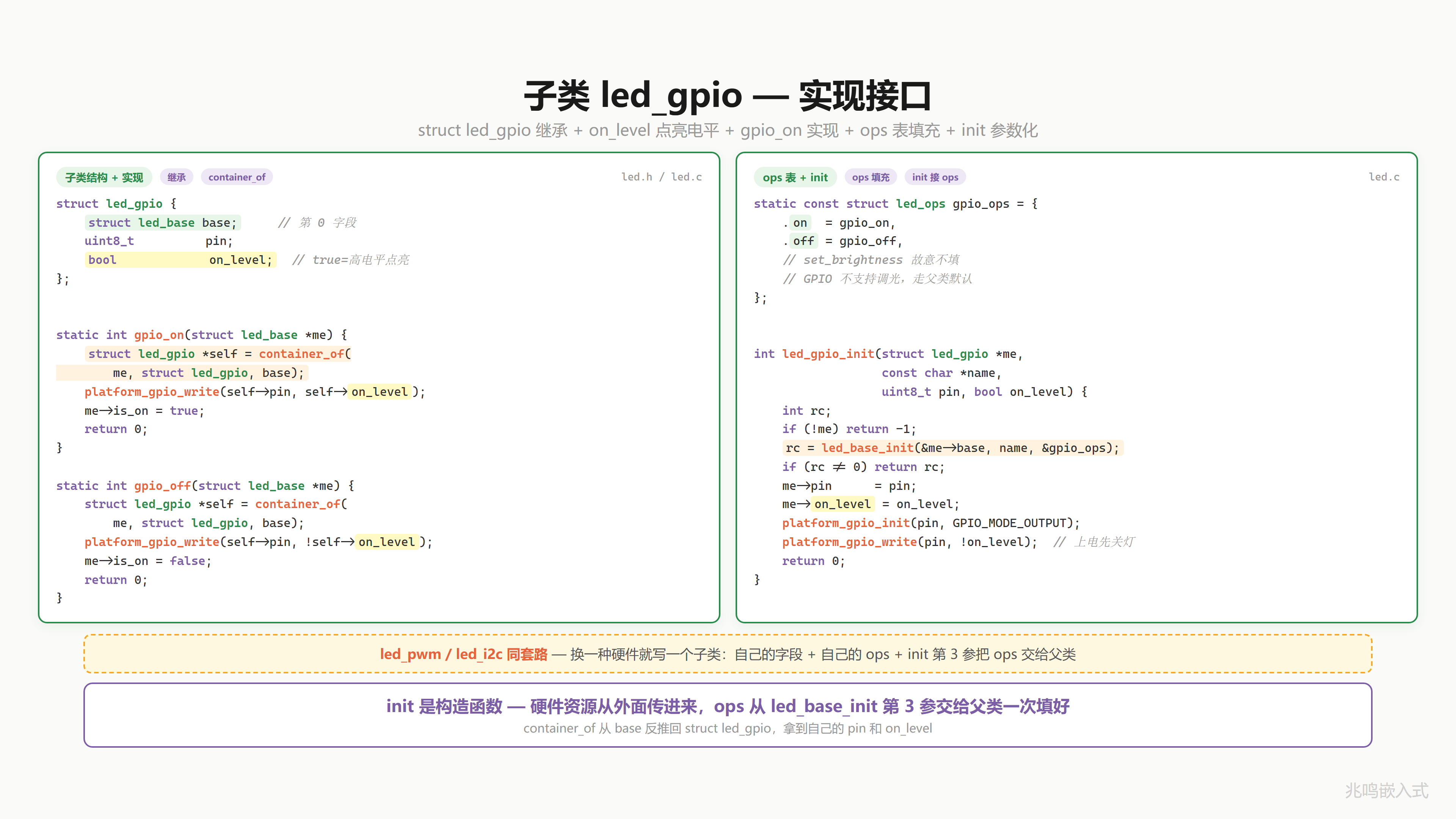
15.3 子类层:三种硬件
子类把 led_base 嵌进自己的结构体,base 放第一个字段——container_of 不挑位置(ch13 § 13.8.2 用 GPIO 子类故意挪 base 到偏移 4 演示过位置无关性,那是教学变形),但工业代码里 base 仍推荐放第一个:向上转型零开销(不需要算偏移),取 me->ops 也是单条 LDR 指令。ch15 起回归工业默认布局,ch13 那个 magic 在前的奇葩布局已经退役。
struct led_gpio {
struct led_base base;
uint8_t pin;
bool on_level; /* 0=低电平亮, 1=高电平亮 */
};
struct led_pwm {
struct led_base base;
uint8_t channel;
uint8_t duty;
};
struct led_i2c {
struct led_base base;
struct platform_i2c_client client; /* bus 句柄 + 7-bit 从机地址, 见 § 15.17.2 */
uint8_t reg; /* 控制寄存器地址 */
};
I2C 子类用 struct platform_i2c_client 而不是简单的 (bus, addr) 两个 uint8_t——这是 ch15 升级到 bus + client 二层抽象 的兑现。client 结构体内嵌 bus 句柄(指向 struct platform_i2c_bus_device *)+ 客户机地址,board 启动期注册 bus、构造期把 bus 句柄交给 client。GPIO / PWM 没有“控制器“概念,不需要这一层;I2C 必须有,因为一个 I2C 控制器上挂多颗芯片是常态。完整论述见 § 15.17.2。
每个子类的实现函数第一行都是 container_of,从 base 反推回子类对象:
static int gpio_on(struct led_base *me)
{
struct led_gpio *self = container_of(me, struct led_gpio, base);
platform_gpio_write(self->pin, self->on_level);
me->is_on = true;
printf(" [%s] led_on -> GPIO Pin%u\n",
me->name, (unsigned)self->pin);
return 0;
}
反推成功之后,就能访问 self->pin 和 self->on_level 这些子类自己的字段。platform_gpio_write 是 ch01 起就存在的封装函数,子类不直接碰寄存器,调下层一个普通 C 函数。
每种子类对应一张 const ops 表:
static const struct led_ops gpio_ops = {
.on = gpio_on,
.off = gpio_off,
};
static const struct led_ops pwm_ops = {
.on = pwm_on,
.off = pwm_off,
.set_brightness = pwm_set_brightness,
};
static const struct led_ops i2c_ops = {
.on = i2c_on,
.off = i2c_off,
};
GPIO 和 I2C 子类只填 on / off,set_brightness 留空(C 标准里静态存储未显式初始化的字段会被零初始化为 NULL,父类的选填默认行为会接住)。PWM 子类三件套全填。三张表全 static,应用层连地址都拿不到,只能通过子类 init 间接挂上 base。
最后是参数化的子类构造函数,第一行调 led_base_init 把对应的 ops 表交给父类:
int led_gpio_init(struct led_gpio *me, const char *name,
uint8_t pin, bool on_level)
{
int rc;
if (!me)
return -1;
rc = led_base_init(&me->base, name, &gpio_ops);
if (rc != 0)
return rc;
me->pin = pin;
me->on_level = on_level;
platform_gpio_init(pin, GPIO_MODE_OUTPUT);
platform_gpio_write(pin, !on_level); /* 上电先关灯 */
return 0;
}
四个参数从外面传进来:对象指针、名字、引脚号、点亮电平。硬件资源不在子类定义里写死。返回 int:0 表示成功,< 0 表示参数非法,调用方(板级层)拿到这个返回值才能在出错时立刻知道哪盏灯没初始化好。这是 C 模拟构造函数的标准做法。
led_pwm_init / led_i2c_init 同套路:先调 led_base_init,再填子类自己的硬件字段,返回 int。换一种硬件,再写一个子类文件,父类 / 板级 / 应用 一字不动。
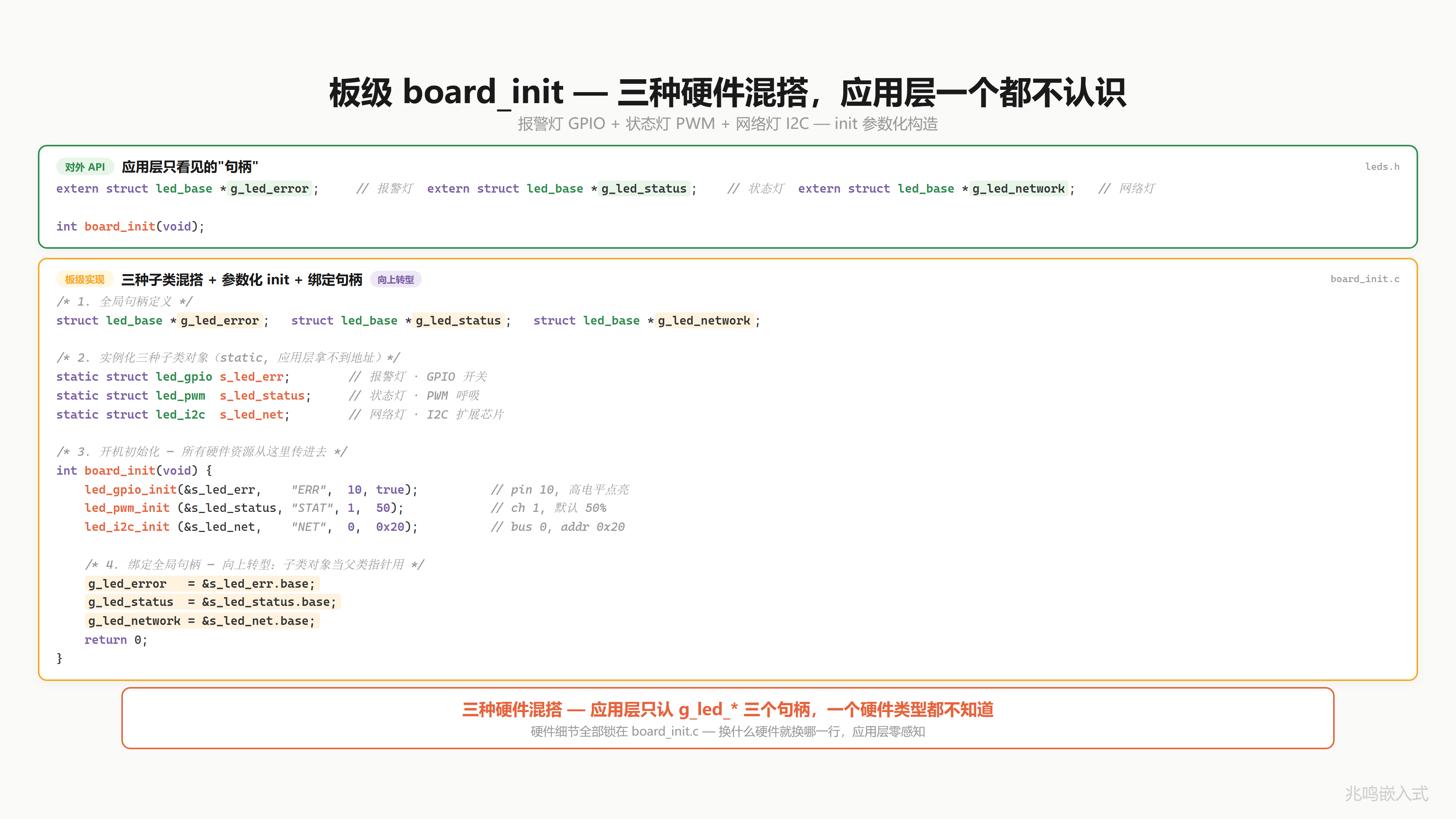
15.4 板级层:唯一认识硬件的文件
leds.h 对外只暴露三个全局句柄 + led_board_init 入口:
#ifndef LEDS_H
#define LEDS_H
#include "led_base.h"
extern struct led_base *g_led_error;
extern struct led_base *g_led_status;
extern struct led_base *g_led_network;
int led_board_init(void);
#endif
句柄类型是父类指针 struct led_base *,不是具体子类。应用层 #include "leds.h" 拿到的就是这一组句柄,分不清底下挂的是 GPIO 还是 PWM 还是 I2C。
函数名带
led_前缀是有意为之。真实工程一块板上不止 LED 一个外设,还有 sensor / uart / motor 等等,每个外设各自一份xxx_board_init.c,谁的硬件参数谁负责。本章把 platform 层 ops 表的注册(platform_pc_pwm_init/platform_pc_i2c_init)拆出去到独立的platform_init.c,因为那一层给所有外设共用,不归 LED 单独管。启动顺序是main()→platform_init()→led_board_init()→ 应用代码。/* platform_init.c - 给所有外设共用的 platform 层 ops 注册 */ int platform_init(void) { platform_pc_pwm_init(); platform_pc_i2c_init(); return 0; }
led_board_init.c 是整个工程里唯一认识 LED 硬件的文件:
#include "leds.h"
#include "led_gpio.h"
#include "led_pwm.h"
#include "led_i2c.h"
#include "platform/platform_i2c.h"
static struct led_gpio s_led_err; /* 文件作用域, 外部不可见 */
static struct led_pwm s_led_status;
static struct led_i2c s_led_net;
struct led_base *g_led_error;
struct led_base *g_led_status;
struct led_base *g_led_network;
int led_board_init(void)
{
struct platform_i2c_bus_device *i2c_bus;
int rc;
/* 调 led_board_init 之前 main 已经调过 platform_init(),
* platform_pwm / platform_i2c 的 ops 注册已经做完,这里只
* 拿 bus 句柄。STM32 端 platform_init 对应 platform/arch/stm32/
* 下三个文件的 platform_hw_pin_init / pwm_init / i2c_init 三函数,
* NXP 端对应 arch/nxp/ 下同款,详见 § 15.17.2 / § 15.17.3。 */
i2c_bus = platform_i2c_bus_get();
if (!i2c_bus) {
printf("[led_board] platform_i2c_bus_get returned NULL\n");
return -1;
}
/* 跑各子类构造函数,把硬件资源传进去。
* GPIO 灯 (ERR) -> pin 10, on_level = high
* PWM 灯 (STAT) -> channel 1, duty 50%
* I2C 灯 (NET) -> bus = i2c_bus 句柄, client_addr 0x3C, reg 0x00
* I2C 这一路 ch15 升级到 bus + client 二层,把 bus 句柄喂给子类,
* 子类内嵌的 struct platform_i2c_client 字段一次填好。 */
rc = led_gpio_init(&s_led_err, "ERR", 10, true);
if (rc != 0) {
printf("[led_board] led_gpio_init(ERR) failed, rc=%d\n", rc);
return rc;
}
rc = led_pwm_init(&s_led_status, "STAT", 1, 50);
if (rc != 0) {
printf("[led_board] led_pwm_init(STAT) failed, rc=%d\n", rc);
return rc;
}
rc = led_i2c_init(&s_led_net, "NET", i2c_bus, 0x3C, 0x00);
if (rc != 0) {
printf("[led_board] led_i2c_init(NET) failed, rc=%d\n", rc);
return rc;
}
g_led_error = &s_led_err.base;
g_led_status = &s_led_status.base;
g_led_network = &s_led_net.base;
return 0;
}
报警灯用 GPIO 开关,最简单;状态灯用 PWM 呼吸,要能调亮度;网络灯挂在 I2C 扩展芯片上,是远程芯片上的灯。三种不同硬件,通过同一个 struct led_base * 接口对外暴露。
实例化三行:三个子类对象都是空的,没赋任何值。硬件资源全部 init 的时候传进去。pin 编号、PWM 通道、I2C bus + client 地址这些常量集中在这一个文件里。
I2C 这一路有一处和 GPIO/PWM 不同:platform_init 先调 platform_pc_i2c_init 把 PC 端的 I2C 控制器 ops 注册进 dispatcher,led_board_init 再用 platform_i2c_bus_get 拿到 bus 句柄,最后把 bus 句柄喂给 led_i2c_init。这是 ch15 升级到 bus + client 二层抽象 的兑现:bus 由 platform 启动期实例化 + 注册(给所有外设共用),client(“挂在总线上的某颗芯片”)由具体外设构造期填好。GPIO 因为没有“控制器“概念(每根 pin 独立),跳过这一步。完整论述见 § 15.17.2。
每盏灯的 init 都返回 int,板级层一一接住。任何一盏失败立刻 return rc,把错误码继续往上传给 main。真实板子上漏了一盏灯的初始化,应用跑起来时才发现 led_on 走 NULL ops 直接 abort,不如开机时就拒绝起来。
最后三行绑定:每个子类对象取 &xxx.base 拿到 base 字段地址,赋给对应的全局父类指针句柄。这一步就是把子类对象“当作“父类指针在用。向上转型(ch12 § 12.2):因为 base 是子类的字段,C99 § 6.7.2.1 保证结构体字段的地址等于结构体加上偏移量后的地址,编译器替我们算偏移(base 在第一个字段时偏移是 0,一条 ADD r0, #0 就被优化掉了)。
绑定完成后,全局句柄准备好了。应用层 #include "leds.h",随便用。
main 先调 platform_init()、再调 led_board_init(),任一失败立刻退:
int main(void)
{
int rc = platform_init();
if (rc != 0) {
printf("[main] platform_init failed, rc=%d, abort.\n", rc);
return 1;
}
rc = led_board_init();
if (rc != 0) {
printf("[main] led_board_init failed, rc=%d, abort.\n", rc);
return 1;
}
power_on_test();
alarm_blink();
status_indicate(0);
status_indicate(1);
return 0;
}
15.5 应用层:grep 零硬件字样
app.c 三个真实业务函数:
#include "leds.h"
#include "app.h"
#include <stdio.h>
void alarm_blink(void)
{
led_on(g_led_error);
led_off(g_led_error);
}
void status_indicate(int err_code)
{
if (err_code == 0)
led_on(g_led_status);
else
led_on(g_led_error);
}
void power_on_test(void)
{
led_on(g_led_error); led_off(g_led_error);
led_on(g_led_status); led_off(g_led_status);
led_on(g_led_network); led_off(g_led_network);
}
不是一个 test_led 就完了,是三个业务函数:报警闪烁(一开一关)、状态指示(按错误码挑亮哪盏)、开机自检(三盏灯依次亮一遍)。十几处调用,全部只用 g_led_* 全局句柄。
不信?打开终端:
$ grep -nE "led_gpio|led_pwm|led_i2c" app.c
$ grep -nE "gpio_write|HAL_GPIO|sysfs" app.c
$ grep -nE "BSRR|0x[0-9A-F]" app.c
三条 grep 全部 0 命中。板级混搭了 GPIO、PWM、I2C 三种硬件,应用层一个都不认识。它只看到三个 struct led_base * 句柄,调 led_on / led_off / led_set_brightness。剩下的事,是哪种子类、走哪个 ops、哪个引脚、哪个总线,全部不关心。

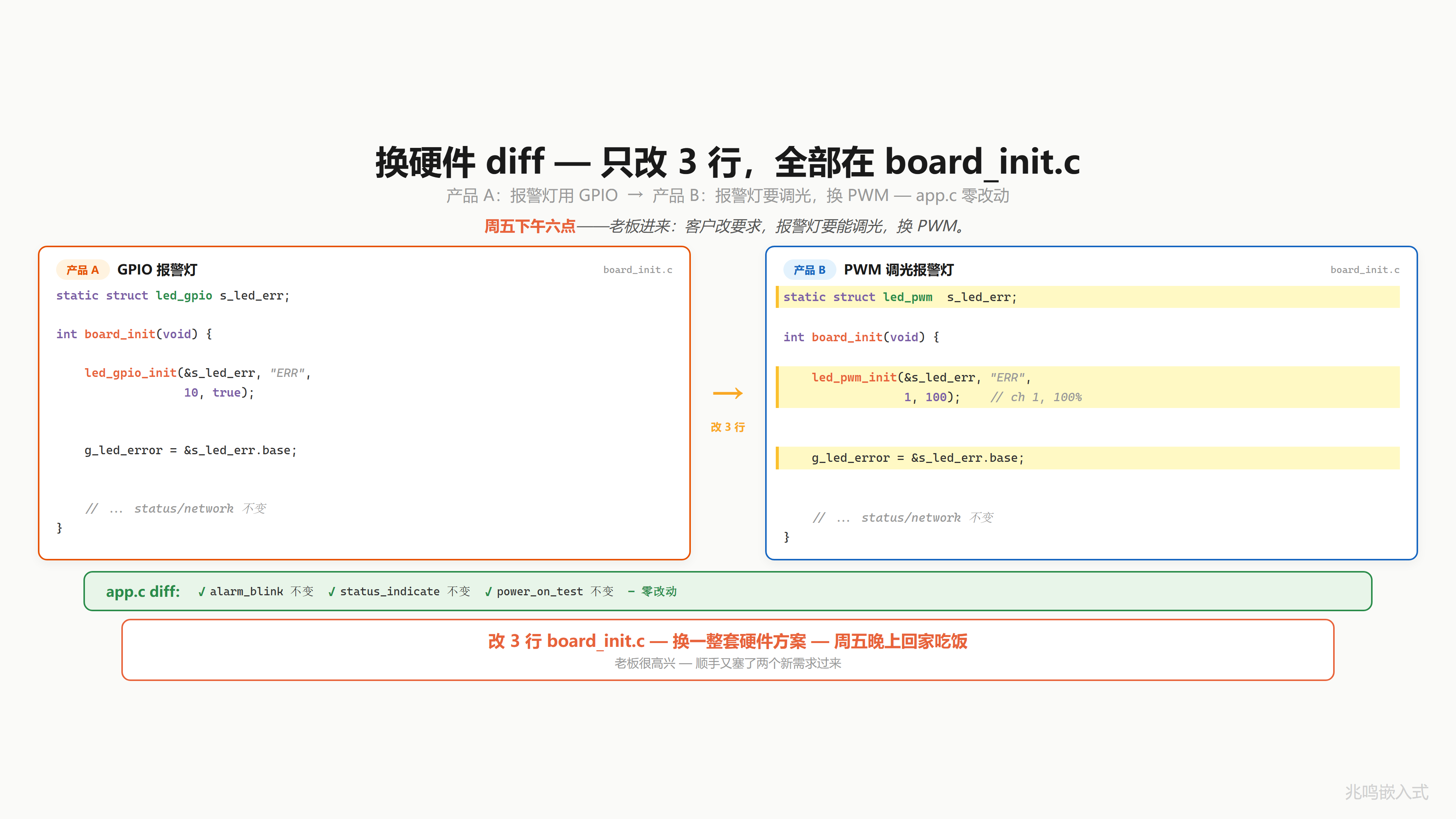
15.6 换硬件 diff:led_board_init 改三行,app.c 零改动
真实场景:周五下午六点,老板进来。客户改要求:报警灯要能调光,从 GPIO 换成 PWM。
打开 led_board_init.c,改 3 行:
-static struct led_gpio s_led_err;
+static struct led_pwm s_led_err;
static struct led_pwm s_led_status;
static struct led_i2c s_led_net;
int led_board_init(void)
{
int rc;
- rc = led_gpio_init(&s_led_err, "ERR", 10, true);
+ rc = led_pwm_init (&s_led_err, "ERR", 2, 80);
if (rc != 0) { ... }
rc = led_pwm_init (&s_led_status, "STAT", 1, 50);
...
g_led_error = &s_led_err.base;
g_led_status = &s_led_status.base;
g_led_network = &s_led_net.base;
return 0;
}
类型那行:struct led_gpio 改成 struct led_pwm。
init 那行:led_gpio_init 换成 led_pwm_init,参数从“10 号引脚、高电平点亮“换成“2 号通道、80% 亮“。
绑定那行:&s_led_err.base 一字不动,base 这个字段名两个子类都有,绑定逻辑天然兼容。
三行改动全部在 led_board_init.c 里面。app.c、三个子类 .c 文件、led_base.c、leds.h、platform_init.c 全部 0 改动。alarm_blink、status_indicate、power_on_test 三个业务函数一行不动。
周五晚上回家吃饭。
老板很高兴,顺手又塞了两个新需求过来。
15.7 Before / After:300 行 → 60 行
来看你走了多远。
最初(ch01 - ch04):
/* gpio_led.c, gpio_led_2.c, gpio_led_3.c — 三份独立代码 */
void red_led_on(void) { HAL_GPIO_WritePin(GPIOA, GPIO_PIN_13, GPIO_PIN_SET); }
void red_led_off(void) { HAL_GPIO_WritePin(GPIOA, GPIO_PIN_13, GPIO_PIN_RESET); }
void green_led_on(void) { HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET); }
void green_led_off(void) { HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET); }
/* ... 8 颗 LED 乘 4 个函数 = 32 个几乎一模一样的函数, 300 多行 */
应用层和 HAL 库直接耦合。改一个名字格式要改三个文件。换硬件?认真考虑辞职。
现在(ch15):
/* app.c */
led_on(g_led_error);
led_set_brightness(g_led_status, 80);
四层架构:父类定义接口、子类实现接口、板级绑定硬件、应用层只用句柄。应用层 60 行。换硬件方案改 led_board_init.c 三行,应用 0 修改。
代码从 300 多行压到 60 行。
但真正重要的不是行数少,是改一处全生效。
一路走来,从一团乱麻到一套架构。
你学的不是语法,是管理复杂系统的思维方式。
15.8 好的架构
好的架构不是让你写更多代码,是让你改更少代码。
15.9 视频里没讲透的几个细节
15.9.1 应用层只 include leds.h 不 include led_gpio.h 的纪律
app.c 顶上你看到的是:
#include "leds.h"
不是:
#include "led_base.h" /* 一般情况:拿父类接口声明就够 */
#include "led_gpio.h" /* 不行: 应用层就知道有 GPIO 这种东西了 */
leds.h 里只 include led_base.h(拿父类接口声明 + base 字段集,子类头文件一概不暴露),把“哪些灯怎么接“全部锁在 led_board_init.c 里。这条纪律保证应用层 grep 不到任何硬件字样。
工业项目里这一招会做得更彻底:连 led_base.h 都不让应用层看到,应用层只 include leds.h,而 leds.h 里把 struct led_base 做成不完整类型(forward declaration),只允许指针操作:
/* leds.h - 工业版 */
struct led_base; /* 不完整类型, 应用层只能用指针 */
extern struct led_base *g_led_error;
int led_on(struct led_base *me);
应用层连 struct led_base 长什么样都不知道,更别提 struct led_gpio。本书早期章节为了演示方便没做到这么彻底,真实工业代码里“应用层连父类内部都看不见“是常态。
一个常见误解要预防:把
struct led_base做成不完整类型只对应用层 opaque,对子类驱动文件不 opaque——子类要拿struct led_ops完整字段集做 designated initializer 填表(static const struct led_ops gpio_ops = { .on = gpio_on, ... };)。所以“给 ops 表加新字段“仍然要重编全部子类驱动.c文件,opaque type 救不了这种重编。Linux 内核的做法是接受字段尾部追加 + 全量重编(in-tree 模块全量 build 是常态),跨编译单元的 ABI 稳定靠的是把struct led_classdev的字段集留给驱动作者拼,应用层走led_classdev_register函数接口。一个例外:ch13 配套代码的
main.c为了printf("offsetof(struct led_gpio, base) = %u")演示 container_of 位置无关,例外 include 了子类头。那是教学需要,不是工业默认。ch15 起main.c严格只#include "leds.h",工业纪律完整兑现。
15.9.2 全局句柄 vs static + getter 的取舍
ch15 用的是一组 extern struct led_base *g_led_xxx 全局句柄。简单直接,一行 extern 就能让应用层拿到。
工业项目里另一种常见做法是 static + getter:
/* led_board_init.c */
static struct led_base *s_led_error; /* static, 只这个文件可见 */
struct led_base *led_error_get(void) /* 暴露 getter */
{
return s_led_error;
}
应用层调 led_error_get() 而不是直接读 g_led_error。代价是多一层函数调用,好处是:
- 可以加 lazy init(第一次调用时才初始化)
- 可以加访问日志 / 锁 / 引用计数
- 可以在 getter 里做“未初始化检查“
教学版用 extern 全局句柄因为最直观;工业版常见 getter,因为接口更稳定(句柄实现可换)。两种都见过你就够了。
15.9.3 板级 mix-and-match:GPIO + PWM + I2C 同时混搭的可读性
ch15 led_board_init.c 同时实例化了 GPIO 灯、PWM 灯、I2C 灯。这是故意的。
很多教学项目只敢做一种:要么全 GPIO,要么全 PWM。讲分层架构的书就栽在这里:读者看到三盏 LED 三个 struct led_gpio,会以为“分层只在同种硬件之间分层“。
混搭演示的是另一件事:分层的真正威力是应用层不知道也不必知道每盏灯具体是哪种硬件。alarm_blink 调 led_on(g_led_error),背后是 GPIO 拉高电平、PWM 设占空比、还是 I2C 发包,上层一字不知。
工业项目里这种混搭是常态:一块板子上几十路输出,有的是 MCU 自己 GPIO,有的接 PWM 控制器,有的挂在 I2C 扩展芯片上。led_board_init.c 把这些差异全部吸收掉,应用层只见统一的 led_base * 句柄。
15.9.4 把“换硬件 diff“思路推广到 motor / sensor
LED 这一招完全可以复用到其他外设。Motor:
struct motor_ops {
int (*set_speed)(struct motor *me, int rpm);
int (*get_position)(struct motor *me, int32_t *pos);
int (*stop)(struct motor *me);
};
struct motor {
const struct motor_ops *ops;
const char *name;
};
/* 子类 */
struct motor_pwm { struct motor base; uint8_t pwm_ch; }; /* 直流 PWM 调速 */
struct motor_can { struct motor base; uint8_t can_id; }; /* 总线伺服 */
Sensor 同理:温度传感器、压力传感器、IMU,每种都是一种子类。应用层调 sensor_read(handle, &val),背后是 ADC、是 I2C、是 SPI,无所谓。
整本书 ch07 - ch14 学到的所有武器,每种外设都套得进去。LED 是教学线索,但这套思维方式是通用的。ch20 工业实战会再用一次:温度传感器 + 压力传感器 + 流量计混搭在同一个采集任务里。
15.10 你现在的代码在 STM32 上长什么样
提示:§15.1 - §15.9 视频版讲的是函数式
platform_gpio_*抽象(一组独立函数 + 数字 pin 编号)·让概念跑通最快。本节起进入工业级兑现层:把厂家差异锁到一份platform/arch/<mcu>/pin_board.c·上面的drivers/led/* / platform/*.c 接口实现跨 MCU 一字不变。两套都讲是因为它们对应“教学引入“和“工业落地“两个不同的复杂度档位。
工业级跨 MCU 工程会把 ch15 这一套四层架构再细分: 应用层 / 设备驱动层 (drivers/led/) / platform 接口层 (platform/platform_*.h+c) / platform 实现层 (platform/arch/<mcu>/pin_board.c)。前三层跨 MCU 字节级不变, 唯一变化点是 platform 实现层一份 pin_board.c。
oop-in-c/code/15-platform/ 目录组织就是这套分层:
15-platform/
├── pc/ PC 教学版四层架构
├── drivers/led/ 设备驱动层·跨 MCU 不变
│ ├── led_base.{h,c}
│ ├── led_gpio.{h,c}
│ ├── led_pwm.{h,c}
│ └── led_i2c.{h,c}
├── platform/ platform 接口层·跨 MCU 不变
│ ├── platform_pin.{h,c} ops 表 + register dispatcher
│ ├── platform_pwm.{h,c}
│ ├── platform_i2c.{h,c}
│ └── arch/ MCU 厂家差异收拢点
│ ├── stm32/pin_board.c STM32 HAL 实现
│ └── nxp/pin_board.c NXP MCUXpresso SDK 实现
└── linux-driver/userspace/ Linux 用户态 (没有 platform 层)
STM32 端的实现写在 platform/arch/stm32/pin_board.c, 启动期 platform_hw_pin_init() 把三组 ops 表 (_stm32_pin_ops / _stm32_pwm_ops / _stm32_i2c_ops) 注册到 dispatcher:
/* platform/arch/stm32/pin_board.c */
static GPIO_TypeDef *const _gpio_table[] = {
GPIOA, GPIOB, GPIOC, GPIOD, GPIOE, /* ... */
};
static void _stm32_pin_write(int32_t pin, int32_t value)
{
GPIO_TypeDef *port = _gpio_table[PIN_PORT(pin)];
HAL_GPIO_WritePin(port, PIN_MASK(pin),
value ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
static const struct platform_pin_ops _stm32_pin_ops = {
.mode = _stm32_pin_mode,
.write = _stm32_pin_write,
.read = _stm32_pin_read,
.get = _stm32_pin_get,
};
drivers/led/led_gpio.c 子类调 platform_pin_write(self->pin, ...), framework 内部 dispatch 就落到 _stm32_pin_write, 最终 HAL_GPIO_WritePin -> GPIOx->BSRR = (1u << pin), 一次 32 位 store, 原子。
PIN 编码: 高 4 位 port (字母 A-Z 偏移), 低 4 位 num. PA.0 = 0x00, PD.12 = 0x3C, PI.14 = 0x8E。一份 uint8_t 同时编码 port 字母和 pin 号, 接口签名只有一个 pin 参数 – 换 MCU 时接口不动, 解码表跟着换。
15.11 Linux 用户态对照·内核做完别再抽
Linux 用户态实现这一套, 禁自抽 platform 层, 内核已经做完。libgpiod / sysfs PWM / i2c-dev 这一组接口本身就是内核 driver model 暴露给用户态的 OOP 接口, 应用层再套一层 platform_gpio_write -> gpiod_line_set_value 就是过度封装, 没拦下任何变化, 反而多了一层没意义的 indirection。
linux-driver/userspace/ 给的就是 “内核做完别再抽” 的代码兑现版本: led_gpio.c 直接 gpiod_line_set_value(self->line, ...), led_pwm.c 直接写 /sys/class/pwm/pwmchipN/pwmM/duty_cycle, led_i2c.c 直接 open("/dev/i2c-1") + ioctl(I2C_SLAVE) + write(fd, [reg, val], 2). 没有 platform_gpio_init 这种自抽中间层。父类 ops 表保留 (OOP 抽象任何平台都该有), 但 platform 抽象层没有, 内核已经做完。
LED 这种通用外设 Linux 内核已经有 drivers/leds/leds-gpio.c 这份内核驱动 – 标准 driver model 写好的版本, 上千种板子用过。所以本目录 linux-driver/ 不再贴自家内核驱动版本, 应用层只走用户态 libgpiod / sysfs / i2c-dev 三条路径。要看真实工业级原型, 直接读内核源 drivers/leds/leds-gpio.c, 完整论述见 § 15.15 + ch16 § 16.13 + 附录 C。“应用层 vs 内核层“这个判断标准 ch16 § 16.14 还会展开。
15.11.5 STM32 vs NXP·换 MCU 不改应用
§ 15.10 给的是 STM32 上 pin_board.c 长什么样。如果要换一颗 MCU – 比如把 STM32F407 换成 NXP i.MX RT1170 – 同一套应用层 / 设备驱动层 / platform 接口层要改多少行?
注意
drivers/led/led_gpio.h的led_gpio_init比 § 15.3 教学版多一层“字符串 pin 名 + 解析“·签名是(me, name, pin_name, active_high)·目的是把 pin 名跨 MCU 解耦——同样的字符串"PA.13"在 stm32 / nxp 下解析出对应 port + bit。教学版直接用uint8_t pin是为了让 § 15.3 学生第一眼跑得通。
platform/arch/nxp/ 给出答案: 应用层 + drivers/led + platform 接口层 0 行。唯一变化点是 platform/arch/<mcu>/{pin_board.c, pwm_board.c, i2c_board.c} 三份文件, 一外设一文件。
按文件清单一过:
| 文件 | 跨 MCU 是否变化 |
|---|---|
main.c / app.c (应用层) | 不变 |
drivers/led/* 4 对 .h/.c (设备驱动层) | 不变 |
platform/platform_*.h + platform/platform_*.c (platform 接口层) | 不变 |
platform/arch/<mcu>/pin_board.c (GPIO 后端) | 变 |
platform/arch/<mcu>/pwm_board.c (PWM 后端) | 变 |
platform/arch/<mcu>/i2c_board.c (I2C bus 后端) | 变 |
换 MCU 改一组 (3 份), 应用层一字不动。这是 platform 层抽象的真正威力。一外设一文件的好处: 加一种新外设 (uart / spi) 只新增 uart_board.c / spi_board.c 一份, 已有三份字节不动; review 时也能 git log pwm_board.c 直接拿 PWM 这一路的独立演化历史。
差别在哪里? 三种外设并排比一过 (左 STM32 HAL, 右 NXP MCUXpresso SDK):
| 外设 | stm32/xxx_board.c 调用 | nxp/xxx_board.c 调用 |
|---|---|---|
| GPIO | HAL_GPIO_WritePin | GPIO_PinWrite |
| PWM | __HAL_TIM_SET_COMPARE | PWM_UpdatePwmDutycycle |
| I2C | HAL_I2C_Master_Transmit | LPI2C_MasterTransferBlocking |
| 时钟使能 | __HAL_RCC_GPIOA_CLK_ENABLE | MCUXpresso BOARD_BootClockRUN |
| 启动入口 | platform_hw_{pin,pwm,i2c}_init() | 同左 (签名一字不差) |
三外设三份后端, 厂家 SDK 类型 (GPIO_TypeDef * vs GPIO_Type *)、寄存器 API 名字、时钟机制全部锁在 platform/arch/<mcu>/ 这一组文件里。这种厂家差异如果漏到 drivers/led/led_gpio.c / led_pwm.c / led_i2c.c, 换 MCU 要改三个子类 + 板级 + 应用层 – ch15 的金句“换硬件不改应用“就破了。
GPIO 写一段并排:
/* platform/arch/stm32/pin_board.c - GPIO 写 */
static GPIO_TypeDef *const _gpio_table[] = {
GPIOA, GPIOB, GPIOC, GPIOD, GPIOE, /* ... */
};
static void _stm32_pin_write(int32_t pin, int32_t value)
{
GPIO_TypeDef *port = _gpio_table[PIN_PORT(pin)];
HAL_GPIO_WritePin(port, PIN_MASK(pin),
value ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
/* platform/arch/nxp/pin_board.c - GPIO 写 */
static GPIO_Type *const _gpio_table[] = {
GPIO1, GPIO2, GPIO3, GPIO4, GPIO5,
};
static void _nxp_pin_write(int32_t pin, int32_t value)
{
GPIO_Type *port = _gpio_table[PIN_PORT(pin)];
GPIO_PinWrite(port, PIN_OFFSET(pin), value ? 1U : 0U);
}
PWM 设占空比一段并排 (落到不同的 TIM PWM API):
/* platform/arch/stm32/pwm_board.c - PWM 设占空比 */
static int _stm32_pwm_set_duty(int32_t channel, uint8_t duty)
{
uint32_t ccr = (uint32_t)duty * 1000U / 255U; /* ARR=999 */
__HAL_TIM_SET_COMPARE(&htim3, _pwm_channel_to_hal(channel), ccr);
return 0;
}
/* platform/arch/nxp/pwm_board.c - PWM 设占空比 */
static int _nxp_pwm_set_duty(int32_t channel, uint8_t duty)
{
uint8_t pct = (uint8_t)((uint32_t)duty * 100U / 255U);
PWM_UpdatePwmDutycycle(PWM1, kPWM_Module_0,
(pwm_channels_t)channel, kPWM_SignedCenterAligned, pct);
PWM_SetPwmLdok(PWM1, (1U << kPWM_Module_0), true);
return 0;
}
I2C 一段 master_xfer 并排 (落到 HAL 阻塞 / LPI2C 阻塞):
/* platform/arch/stm32/i2c_board.c - I2C bus master_xfer */
if (msgs[i].flags & PLATFORM_I2C_RD)
st = HAL_I2C_Master_Receive(&hi2c1, addr8, msgs[i].buf, msgs[i].len, 100);
else
st = HAL_I2C_Master_Transmit(&hi2c1, addr8, msgs[i].buf, msgs[i].len, 100);
/* platform/arch/nxp/i2c_board.c - I2C bus master_xfer */
xfer.slaveAddress = (uint8_t)msgs[i].addr;
xfer.direction = (msgs[i].flags & PLATFORM_I2C_RD) ? kLPI2C_Read : kLPI2C_Write;
xfer.data = msgs[i].buf;
xfer.dataSize = msgs[i].len;
st = LPI2C_MasterTransferBlocking(LPI2C1, &xfer);
drivers/led/* 子类只调 platform_pin_xxx / platform_pwm_xxx / platform_i2c_xxx ops 表层接口, 跨 MCU 字节级不变。platform/platform_*.c dispatcher 维护 static const struct platform_xxx_ops *_g_ops 指针 (i2c 多一个 bus 槽), 启动期由 platform/arch/<mcu>/{pin,pwm,i2c}_board.c 三个 platform_hw_*_init() 函数各调一次 register 把 ops 填进来 – 上层调封装函数时框架内部 dispatch 到对应 MCU 的实现。这就是 ch11 ops 表多态在 ch15 platform 层的工业级落地。
板级启动序列也是一字对照: platform_init 里依次调 platform_hw_pin_init() -> platform_hw_pwm_init() -> platform_hw_i2c_init() 三行, STM32 / NXP 两家代码这三行完全一样, 改的只是链接的 arch/stm32/ 还是 arch/nxp/ 子目录里那 3 份后端。LED 模块自己的硬件参数走 led_board_init,跟 platform 注册分两层职责(platform_init 服务所有外设,led_board_init 只管 LED)。
15.12 工业代码里的“换硬件 diff“长什么样
工业项目里这一章的精神已经渗透到每个层级。挑一个真实场景:报警子系统。
需求:板子上有 8 路报警输出。客户 A 用 LED 灯提示,客户 B 接蜂鸣器,客户 C 接外接报警柱(24V 信号)。三家客户买的是同一个主控板,只有“报警这一路“硬件不同。
工业代码里 alarm_board_init.c 长这样(每个外设各一份板级文件,沿用 ch12 起的“模块 + 板级配置“分层):
/* alarm_board_init_customerA.c - 8 路全 LED */
static struct led_gpio s_alarm[8];
int alarm_board_init(void)
{
int rc = led_gpio_init(&s_alarm[0], "ALM_0", 10, true);
if (rc != 0) return rc;
/* ... 7 个 ... */
for (int i = 0; i < 8; i++)
g_alarm[i] = &s_alarm[i].base;
return 0;
}
/* alarm_board_init_customerB.c - 8 路全蜂鸣器 (PWM 控频率) */
static struct led_pwm s_alarm[8];
int alarm_board_init(void)
{
int rc = led_pwm_init(&s_alarm[0], "ALM_0", 1, 50);
if (rc != 0) return rc;
/* ... 7 个 ... */
for (int i = 0; i < 8; i++)
g_alarm[i] = &s_alarm[i].base;
return 0;
}
/* alarm_board_init_customerC.c - 8 路全外接报警柱 (I2C 扩展芯片) */
static struct led_i2c s_alarm[8];
int alarm_board_init(void)
{
int rc = led_i2c_init(&s_alarm[0], "ALM_0", 0, 0x20);
if (rc != 0) return rc;
/* ... 7 个 ... */
for (int i = 0; i < 8; i++)
g_alarm[i] = &s_alarm[i].base;
return 0;
}
三家客户三份 alarm_board_init_*.c,编译期挑一份链进去。应用层报警逻辑(alarm_trigger / alarm_clear / alarm_run_self_test)一份代码三家共用。这就是“产品角色 → 硬件映射“的工程化形态:业务代码完全不知道客户 A B C 之间的硬件差异,硬件差异全部锁在 alarm_board_init 这一个文件里。
ch19 / ch20 工业实战会展开真实主控板项目里的板级文件,看看一组 xxx_board_init.c 怎么管 30+ 路硬件。
15.13 完整源码清单 + 跑一遍
把下面的代码块分别保存到对应文件,目录结构和 oop-in-c/code/15-platform/pc/ 一致。make && ./demo 即可跑通。
完整文件清单:
15-platform/
├── pc/ 本节代码块, make && ./demo 直接跑
│ ├── main.c 主程序入口
│ ├── app.h, app.c 应用层 - 三个业务函数
│ ├── leds.h LED 模块对外暴露的 g_led_xxx 句柄声明
│ ├── led_board_init.c 板级 - 唯一认识 LED 硬件的文件
│ ├── platform_init.h, platform_init.c PC 后端 platform_pwm/i2c ops 注册(给所有外设共用)
│ ├── led_base.h, led_base.c 父类 - led_base + ops 表 + 父类统一接口
│ ├── led_gpio.h, led_gpio.c 子类一 - GPIO LED (on/off, set_brightness 走父类默认)
│ ├── led_pwm.h, led_pwm.c 子类二 - PWM LED (三件套全填, set_brightness 直接调 duty)
│ ├── led_i2c.h, led_i2c.c 子类三 - I2C 扩展芯片 LED (on/off, 走 bus+client 二层)
│ ├── platform_pwm_pc.c PC 后端 PWM ops 注册 (跟 STM32 arch/stm32/pin_board.c 同套路)
│ ├── platform_i2c_pc.c PC 后端 I2C bus 注册 (同上)
│ ├── container_of.h 与 ch13 同款 (最小可用版)
│ └── Makefile 链接 ../../common/platform_pc.c + ../platform/*.c
├── drivers/led/ 设备驱动层·跨 MCU 不变
│ ├── led_base.{h,c} 父类层 (调 platform_pin/pwm/i2c ops 接口)
│ ├── led_gpio.{h,c}
│ ├── led_pwm.{h,c}
│ └── led_i2c.{h,c}
├── platform/ platform 接口层·跨 MCU 不变
│ ├── platform_pin.{h,c} ops 表 + register dispatcher
│ ├── platform_pwm.{h,c}
│ ├── platform_i2c.{h,c}
│ └── arch/ MCU 厂家差异收拢点
│ ├── stm32/pin_board.c STM32 HAL 实现
│ └── nxp/pin_board.c NXP MCUXpresso SDK 实现
└── linux-driver/userspace/ Linux 用户态 (直接 libgpiod / sysfs / i2c-dev,
没有 platform 层)
每个子类一份独立的 .h / .c,和工业项目里 LED 驱动模块的组织一字不差。教学上的好处:加一种新硬件 (例如 SPI 移位寄存器 LED) 只新增 led_spi.h / led_spi.c 一对文件,原有三个子类一字不动;review 时也能 git log led_pwm.c 直接拿到 PWM 这一路独立的演化历史。父类层公开接口集中在 led_base.h / led_base.c 一对文件里 (字段集 + ops 表 + 共有 init + 父类统一接口), 子类头文件一概不暴露给应用层 – ch12 起到 ch16 / 附录 B / 附录 C 都按这个组织.
drivers/ + platform/ + platform/arch/<mcu>/ 这一组工业级跨 MCU 分层在本章正文 § 15.10 / § 15.11.5 已经讲过, 是 STM32 vs NXP “换 MCU 改一份 pin_board.c” 的代码兑现层, 不在本节的“代码块抄一遍跑通“流程里。linux-driver/userspace/ 是 Linux 用户态实战代码 (没有 platform 层), 见 § 15.11.
文件 1:main.c
/* SPDX-License-Identifier: MIT */
#include "app.h"
#include "leds.h"
#include "platform_init.h"
#include <stdio.h>
int main(void)
{
int rc;
printf("=========================================\n");
printf(" ch15 - OOP complete framework demo\n");
printf("=========================================\n");
rc = platform_init();
if (rc != 0) {
printf("[main] platform_init failed, rc=%d, abort.\n", rc);
return 1;
}
rc = led_board_init();
if (rc != 0) {
printf("[main] led_board_init failed, rc=%d, abort.\n", rc);
return 1;
}
power_on_test();
alarm_blink();
status_indicate(0); /* 正常 -> 状态灯 */
status_indicate(1); /* 故障 -> 报警灯 */
printf("\n=========================================\n");
printf(" app.c never named any hardware type\n");
printf("=========================================\n");
printf("\nPress Enter to exit...\n");
getchar();
return 0;
}
文件 2:app.h
/* SPDX-License-Identifier: MIT */
#ifndef APP_H
#define APP_H
void alarm_blink(void);
void status_indicate(int err_code);
void power_on_test(void);
#endif
文件 3:app.c
/* SPDX-License-Identifier: MIT */
#include "leds.h"
#include "app.h"
#include <stdio.h>
void alarm_blink(void)
{
printf("\n--- alarm_blink ---\n");
led_on(g_led_error);
led_off(g_led_error);
}
void status_indicate(int err_code)
{
printf("\n--- status_indicate(err_code=%d) ---\n", err_code);
if (err_code == 0)
led_on(g_led_status);
else
led_on(g_led_error);
}
void power_on_test(void)
{
printf("\n--- power_on_test ---\n");
led_on(g_led_error); led_off(g_led_error);
led_on(g_led_status); led_off(g_led_status);
led_on(g_led_network); led_off(g_led_network);
}
文件 4:leds.h
/* SPDX-License-Identifier: MIT */
#ifndef LEDS_H
#define LEDS_H
#include "led_base.h"
extern struct led_base *g_led_error;
extern struct led_base *g_led_status;
extern struct led_base *g_led_network;
int led_board_init(void);
#endif
应用层 app.c 只 #include "leds.h", 看到的就是 struct led_base * 三个父类指针。这一份头从来不 #include "led_gpio.h" / "led_pwm.h" / "led_i2c.h", 子类类型在应用层完全消失。
文件 5a:platform_init.h
/* SPDX-License-Identifier: MIT */
#ifndef PLATFORM_INIT_H
#define PLATFORM_INIT_H
int platform_init(void);
#endif
文件 5b:platform_init.c
/* SPDX-License-Identifier: MIT */
#include "platform_init.h"
extern void platform_pc_pwm_init(void);
extern void platform_pc_i2c_init(void);
int platform_init(void)
{
platform_pc_pwm_init();
platform_pc_i2c_init();
return 0;
}
把 PC 后端的 platform_pwm / platform_i2c ops 表注册进 dispatcher,给所有外设共用。STM32 端这一步在 platform/arch/stm32/{pin,pwm,i2c}_board.c 的 platform_hw_xxx_init 三函数里做,PC 端拆成 platform_pwm_pc.c + platform_i2c_pc.c,由 platform_init() 一次调完。
文件 5c:led_board_init.c
/* SPDX-License-Identifier: MIT */
#include "leds.h"
#include "led_gpio.h"
#include "led_pwm.h"
#include "led_i2c.h"
#include "platform/platform_i2c.h"
#include <stdio.h>
static struct led_gpio s_led_err;
static struct led_pwm s_led_status;
static struct led_i2c s_led_net;
struct led_base *g_led_error;
struct led_base *g_led_status;
struct led_base *g_led_network;
int led_board_init(void)
{
struct platform_i2c_bus_device *i2c_bus;
int rc;
/* 调本函数前 main 已经调过 platform_init(), platform_pwm /
* platform_i2c 的 ops 注册已经做完, 这里只拿 bus 句柄. */
i2c_bus = platform_i2c_bus_get();
if (!i2c_bus) {
printf("[led_board] platform_i2c_bus_get returned NULL\n");
return -1;
}
rc = led_gpio_init(&s_led_err, "ERR", 10, true);
if (rc != 0) {
printf("[led_board] led_gpio_init(ERR) failed, rc=%d\n", rc);
return rc;
}
rc = led_pwm_init(&s_led_status, "STAT", 1, 50);
if (rc != 0) {
printf("[led_board] led_pwm_init(STAT) failed, rc=%d\n", rc);
return rc;
}
rc = led_i2c_init(&s_led_net, "NET", i2c_bus, 0x3C, 0x00);
if (rc != 0) {
printf("[led_board] led_i2c_init(NET) failed, rc=%d\n", rc);
return rc;
}
g_led_error = &s_led_err.base;
g_led_status = &s_led_status.base;
g_led_network = &s_led_net.base;
return 0;
}
文件 6:led_base.h
/* SPDX-License-Identifier: MIT */
#ifndef LED_BASE_H
#define LED_BASE_H
#include "platform.h"
struct led_base;
struct led_ops {
int (*on)(struct led_base *me); /* 必填 */
int (*off)(struct led_base *me); /* 必填 */
int (*set_brightness)(struct led_base *me, /* 选填 */
uint8_t brightness);
};
struct led_base {
const struct led_ops *ops;
const char *name;
bool is_on;
};
int led_base_init(struct led_base *me, const char *name,
const struct led_ops *ops);
int led_on(struct led_base *me);
int led_off(struct led_base *me);
int led_set_brightness(struct led_base *me, uint8_t brightness);
#endif
struct led_ops 完整定义放在父类头里. 子类头 (led_gpio.h / led_pwm.h / led_i2c.h) 一行 #include "led_base.h" 就能拿到 ops 表类型, 不再需要前向声明 + 子类头反向暴露 ops 字段集.
文件 7:led_base.c
/* SPDX-License-Identifier: MIT */
#include "led_base.h"
#include <assert.h>
#include <stdio.h>
int led_base_init(struct led_base *me, const char *name,
const struct led_ops *ops)
{
if (!me || !name || !ops)
return -1;
me->ops = ops;
me->name = name;
me->is_on = false;
return 0;
}
int led_on(struct led_base *me)
{
if (!me)
return -1;
assert(me->ops && me->ops->on &&
"led_on: subclass must implement on()");
return me->ops->on(me);
}
int led_off(struct led_base *me)
{
if (!me)
return -1;
assert(me->ops && me->ops->off &&
"led_off: subclass must implement off()");
return me->ops->off(me);
}
int led_set_brightness(struct led_base *me, uint8_t b)
{
if (!me || !me->ops)
return -1;
if (!me->ops->set_brightness) {
printf(" [%s] no dimming, skip (brightness=%u)\n",
me->name, (unsigned)b);
return 0;
}
return me->ops->set_brightness(me, b);
}
文件 8:led_gpio.h / led_gpio.c(子类一)
led_gpio.h:
/* SPDX-License-Identifier: MIT */
#ifndef LED_GPIO_H
#define LED_GPIO_H
#include "led_base.h"
struct led_gpio {
struct led_base base; /* 父类, 第 0 字段 */
uint8_t pin;
bool on_level; /* 1 = 高电平点亮, 0 = 低电平点亮 */
};
int led_gpio_init(struct led_gpio *me, const char *name,
uint8_t pin, bool on_level);
#endif
led_gpio.c:
/* SPDX-License-Identifier: MIT */
#include "led_gpio.h"
#include "container_of.h"
#include "platform.h"
#include <stdio.h>
static int gpio_on(struct led_base *me)
{
struct led_gpio *self = container_of(me, struct led_gpio, base);
platform_gpio_write(self->pin, self->on_level);
me->is_on = true;
printf(" [%s] led_on -> GPIO Pin%u\n",
me->name, (unsigned)self->pin);
return 0;
}
static int gpio_off(struct led_base *me)
{
struct led_gpio *self = container_of(me, struct led_gpio, base);
platform_gpio_write(self->pin, !self->on_level);
me->is_on = false;
printf(" [%s] led_off -> GPIO Pin%u\n",
me->name, (unsigned)self->pin);
return 0;
}
/* set_brightness 故意不填, GPIO 不支持调光, 走父类默认行为 */
static const struct led_ops gpio_ops = {
.on = gpio_on,
.off = gpio_off,
};
int led_gpio_init(struct led_gpio *me, const char *name,
uint8_t pin, bool on_level)
{
int rc;
if (!me)
return -1;
rc = led_base_init(&me->base, name, &gpio_ops);
if (rc != 0)
return rc;
me->pin = pin;
me->on_level = on_level;
platform_gpio_init(pin, GPIO_MODE_OUTPUT);
platform_gpio_write(pin, !on_level); /* 上电先关灯 */
return 0;
}
文件 9:led_pwm.h / led_pwm.c + led_i2c.h / led_i2c.c(子类二、三)
PWM 子类 (三件套全填, 支持调光) + I2C 子类 (两件套, 只控开/关) 跟 GPIO 一字同套路:子类头里只装 struct + init 声明, 子类 .c 里 file-static 实现 + file-static const ops 表 + 公开的 init 函数。完整源码见 oop-in-c/code/15-platform/pc/led_pwm.{h,c} 和 led_i2c.{h,c}。
加一种新硬件 (例如 SPI 移位寄存器 LED) 就是新增一对 led_spi.h / led_spi.c,原有三个子类 0 改动,led_board_init.c 多挂一行实例。这就是 OOP 多态在文件组织层面的兑现。
文件 10:Makefile
CC = gcc
CFLAGS = -Wall -Wextra -std=c99 -I../../common -I..
TARGET = demo
SRCS = main.c app.c \
led_base.c led_gpio.c led_pwm.c led_i2c.c \
led_board_init.c \
platform_init.c \
platform_pwm_pc.c platform_i2c_pc.c \
../platform/platform_pwm.c ../platform/platform_i2c.c \
../../common/platform_pc.c
.PHONY: all clean run
all: $(TARGET)
$(TARGET): $(SRCS)
$(CC) $(CFLAGS) -o $(TARGET) $(SRCS)
run: $(TARGET)
./$(TARGET)
clean:
rm -f $(TARGET) $(TARGET).exe
-I.. 让源码用 #include "platform/platform_i2c.h" 风格的相对路径,跟 drivers/led/、platform/arch/<mcu>/ 同款路径形态——这样 PC 端和真机端的 #include 形式一致,子类源码字节级不动。
platform_pwm_pc.c / platform_i2c_pc.c 是 PC 后端的 ops 表注册胶水,跟 STM32 端 platform/arch/stm32/pin_board.c 的 platform_hw_pin_init 结构完全一致,区别只在底下打的是 printf 还是 HAL_GPIO_*。../platform/platform_pwm.c / ../platform/platform_i2c.c 是 platform 接口层 dispatcher,跨 MCU / 跨平台一字不动,详见 § 15.17.2 / § 15.17.3。
跑一遍
cd oop-in-c/code/15-platform/pc
make
./demo
期望输出:
=========================================
ch15 - OOP complete framework demo
=========================================
[GPIO] PA.10 init as OUTPUT
[GPIO] PA.10 -> LOW (OFF)
--- power_on_test ---
[GPIO] PA.10 -> HIGH (ON)
[ERR] led_on -> GPIO Pin10
[GPIO] PA.10 -> LOW (OFF)
[ERR] led_off -> GPIO Pin10
[STAT] led_on -> PWM ch1 duty=50%
[STAT] led_off -> PWM ch1 duty=0%
[NET] led_on -> I2C bus0 addr=0x20
[NET] led_off -> I2C bus0 addr=0x20
--- alarm_blink ---
[GPIO] PA.10 -> HIGH (ON)
[ERR] led_on -> GPIO Pin10
[GPIO] PA.10 -> LOW (OFF)
[ERR] led_off -> GPIO Pin10
--- status_indicate(err_code=0) ---
[STAT] led_on -> PWM ch1 duty=50%
--- status_indicate(err_code=1) ---
[GPIO] PA.10 -> HIGH (ON)
[ERR] led_on -> GPIO Pin10
=========================================
app.c never named any hardware type
=========================================
[ERR] led_on -> GPIO Pin10 这一行打的就是子类层在做的事:同一句 led_on(g_led_error),对 ERR 落到 GPIO 拉高电平、对 STAT 落到 PWM 设占空比、对 NET 落到 I2C 发包。应用层一字不知。
开机第一行 [GPIO] PA.10 init as OUTPUT + [GPIO] PA.10 -> LOW (OFF) 是 GPIO 子类 init 末尾把灯先关掉的痕迹(见 led_gpio_init 最后一行 platform_gpio_write(pin, !on_level)),避免上电瞬间 LED 莫名其妙亮起来。
15.14 视频回放
15.15 什么时候不要 Platform 层
到这里你已经看完一整套 platform 抽象层. 别急着把它套到所有项目上.
Platform 抽象层是工具, 不是教条. 工业级代码不等于“不管什么环境都自己写一套 platform_pin / platform_i2c / platform_pwm“. 判断标准只有一条: 宿主环境有没有现成的设备模型. 没有就要自抽, 有就别重复造.
四种环境拉平来看:
| 环境 | 现成的设备模型 | platform 抽象层 |
|---|---|---|
| 裸机 (STM32 + HAL) | 无, HAL 只是寄存器封装 | 必须自抽 |
| 简单 RTOS (FreeRTOS 单纯 kernel) | 无, kernel 只管任务和同步 | 必须自抽 |
| 带 device subsystem 的 RTOS (Zephyr / RT-Thread / NuttX) | 有, 内核已抽好 device + driver | 禁自抽 |
| Linux 用户态 | 有, libgpiod / i2c-dev / sysfs PWM | 禁自抽, 直接用 |
| Linux 内核态驱动 | 有, driver model + bus 框架 | 禁自抽, 用 driver model |
HAL 不是设备模型. HAL 只是把 GPIOA->BSRR = bit 这种寄存器操作封了一层 HAL_GPIO_WritePin. 它没有“设备“概念, 没有“驱动注册“, 没有“统一接口“. 子类要换 STM32 / GD32 / 瑞萨, 应用层就崩. 这种环境必须自抽 platform 层.
Linux 用户态完全相反. 内核已经把 GPIO 抽成 /dev/gpiochipN, libgpiod 一个 gpiod_line_set_value 跨芯片厂家通吃. 这时再写一份 platform_pin_write → libgpiod_line_set_value, 读者第一眼就会问 “为什么还要套一层”. 答不出来. 这就是反工程.
这里要分清两件事. OOP 抽象和platform 抽象层不是一回事:
- OOP 抽象:
struct led_base+ 多子类多态 + 设备句柄统一对外. 解决的是“应用层不知道下层硬件细节“. 任何环境都该有. - platform 抽象层:
platform_pin / platform_i2c+ ops 表 + register 机制. 解决的是“裸机没有设备模型, 自己造一个“. 只在没现成设备模型的环境有价值.
OOP 抽象是必备. platform 抽象层是工程工具. 别把后者当成 OOP 的标配.
后面三章给完整光谱. ch16 看 Linux 内核怎么做 platform 抽象, 内核版本是工业级原型. 附录 B 看裸机 STM32 自抽 platform 层, 是没有内核帮忙时的标准做法. 附录 C 看 Linux 用户态怎么直接用内核接口, 是“已经有现成设备模型时, 应用层别再叠一层“的反例教学.
Platform 抽象层是工具, 不是工业级的标志. 看到一份 Linux 应用层代码自己抽 platform_pin, 第一反应应当是 “这一层是不是多余”. 看到一份裸机 STM32 代码不抽 platform 层, 应用直接调 HAL_GPIO_WritePin, 第一反应应当是 “换芯片就崩”. 工程判断力, 是分清这两种场景, 不是无脑套抽象.
15.16 给真实工程的建议:别自己写 platform 层
讲到这里我得给你掏一句真心话: 这本书 ch15 / ch16 / 附录 B 教你怎么自抽 platform 层, 是为了让你看清机制. 真实工程里, 这一层尽量别自己写. 写出来就要自己维护.
资源不紧的项目, 用 Zephyr, 第一推荐. 几乎所有 MCU 项目都属于这一档 – 分层设计本身不占资源, 一份 device + driver 模型加上去, ROM 几 KB, RAM 几百字节, 现代 STM32 / nRF / ESP32 / GD32 都扛得住. Zephyr 内核已经把 device tree binding + driver_api ops 表 + initcall 全做完了. 你 ch15 / ch16 / ch17 学的所有 platform 抽象 + ops 多态 + 链接器收卡片, 在 Zephyr 里都是 builtin, 而且是 Linux Foundation 在维护, 跨芯片厂家的 driver 已经写好上千份, 你直接 device_get_binding("gpio0") 就能用.
RT-Thread 第二推荐. 国产 RTOS, 中文文档全, rt_pin_write / rt_device_register 一套接口和 ch16 教的 gpio_chip 多态 dispatch 一字不差. 国内项目和厂家芯片支持也到位, BSP 列表覆盖主流国产 MCU.
FreeRTOS 是裸机化 RTOS, 慎用. 它只是一个调度核 + 同步原语, 不带 device subsystem, 不带 driver model. 用 FreeRTOS 等于 “FreeRTOS + HAL + 你自己抽 platform 层”, 这本书 ch15 教的全套你得自己造一遍, 维护成本你扛. 简单板卡可以这么干, 中等以上规模 (10+ 路硬件 / 多客户多产品形态) 别这么干.
资源极紧但仍想用这套思想, 不要自己手写 platform 层. clone Zephyr 或 RT-Thread, 把它们的 driver framework 拔下来直接用 – driver 注册机制 + ops 表 + device tree 解析这一坨, Zephyr / RT-Thread 已经写了十几年, 上万种硬件验证过, 比你三周自抽出来的 ops 表稳得多. 你拔下来用就完了, 自己写一份是没意义的.
这本书 ch15 配套代码 (oop-in-c/code/15-platform/) 那一份 platform 层是教学示范. 让读者建立认知 – 看清 platform 抽象长什么样、ops 表怎么挂、register 机制怎么落. 真实工程里, 这一份你别自己写, 去用 Zephyr / RT-Thread.
MPU / SoC 平台直接用 Linux. 跑得起 Linux 内核的硬件, driver model + bus 框架 + device tree + sysfs / udev 全套完整, 你 ch16 / 附录 C 看到的就是工业级原型. 应用层走 libgpiod / iio / spidev, 内核驱动写在 driver_model 里, 全平台都不用自己抽 platform 层.
把它合成一句话: MCU 用 Zephyr / RT-Thread, MPU / SoC 用 Linux, 全平台都不要自己抽 platform 层. 这才是工业级.
那 ch15 这一章是不是白学了? 不是. 你学的是 Zephyr / RT-Thread / Linux 内核 driver model 在做什么 – 它们底下就是 ops 表 + 多子类多态 + 子类向上转型 + 父类统一接口, 一字不差. 没看过 ch15 / ch16 这一遍, 你打开 Zephyr 源码看 gpio_driver_api、打开 RT-Thread 源码看 rt_pin_ops, 第一反应是 “这函数指针表怎么这么乱”. 看完 ch15 / ch16, 你的反应是 “ops 表 + 子类填表, ch15 教过, 直接用”.
学这本书是为了看懂别人的 platform 层, 不是为了让你自己写一个. 看懂了, 你就敢用别人写好的; 看不懂, 你才会被迫自己造一份糟糕版本.
看完 § 15.11.5 的 platform/arch/stm32 vs platform/arch/nxp 对照, 你应当看到: platform 层抽象的真正本质, 是把厂家差异 (GPIO_TypeDef * / GPIO_Type * / HAL_GPIO_WritePin / GPIO_PinWrite) 收拢到一份 pin_board.c。drivers/led/* 设备驱动层 + platform/platform_*.c 接口层跨 MCU 字节级不变, 唯一变化点是 platform/arch/<mcu>/pin_board.c 一份文件。换 MCU 改一份, 应用层一字不动。Linux / Zephyr / RT-Thread 内核已经做完同款工作, 所以应用层别再自抽。这就是上面 § 15.15 那张表的另一种写法: 没有内核 driver model 帮忙的环境 (裸机 / FreeRTOS) 自抽这层是在为换 MCU 留余地; 有 driver model 帮忙的环境 (Zephyr / RT-Thread / Linux) 自抽这层是在重复造轮子。
最后一节 § 15.17 把 ch15 主线之外的 platform 层全貌补齐: 工业项目 platform 层完整有几个外设、I2C 为什么比 GPIO 多一层 bus + client、这一套设计跟 Linux i2c 子系统骨架的逐字对应关系。看完 § 15.17, 你看到的就不是 ch15 教学版三个外设, 而是整个 platform 抽象的完整光谱。
15.17 工业 platform 层完整清单 + I2C 二层 + Linux i2c 子系统对照
15.17.1 工业项目 platform 层有多大
ch15 主线只展示 platform_pin / platform_pwm / platform_i2c 三个外设。我做过的一台 STM32H7 控制板项目, 真实的 platform 层覆盖一组 12 个接口:
注: 表格列的是工业完整版的 ops 数·教学版 § 15.17.3 简化为只
master_xfer·让读者第一眼跑通。slave_xfer / control在工业实际工程里齐全·读者真机做完整工程时按本节描述补齐即可。
| 外设 | ops 函数指针数 | bus / device 二层? | 文件量级 |
|---|---|---|---|
| device | 6 (init / open / close / read / write / control) | 父类 | ~400 行 |
| pin | 7 | 单层 | ~230 行 |
| pwm | 1 (control 内 8 cmd) | 单层 | ~280 行 |
| i2c | 3 (master_xfer / slave_xfer / control) | 是, bus + client + msg | ~370 行 |
| spi | 2 (configure / xfer) | 是, bus + device | ~460 行 |
| uart | 5 (open / close / read / write / configure) | 单层 | ~300 行 |
| adc / hwtimer / rtc / watchdog | 各几条 ops | 单层 | 各几十到几百行 |
ch15 教学版选 3 个讲透机制, 完整 12 个接口的形态在本节后面顺手点过。机制都是同一个 – ops 表 + register 注册 – 学一个推所有, 多出来的那 9 个看清 ops 表上挂什么函数即可。
15.17.2 i2c 为什么比 GPIO 多一层
GPIO 是单点 IO, 一个 pin 一个值。i2c 是总线 + 多设备: 一条 i2c 总线上挂多颗芯片 (温度传感器 0x48 + EEPROM 0x50 + RTC 0x68 …), 多颗芯片共享同一组 SDA / SCL 线。
这一脚就要二层抽象:
- bus 控制器层 管 SCL / SDA 时序、中断、DMA、多 client 抢同一总线的互斥锁。一颗 MCU 通常 1-4 条 i2c bus。
- client 设备层 记录: 我挂在哪条 bus 上, 我的 7-bit 地址是多少。一颗芯片 (温度传感器 / EEPROM / IO expander) 一个 client。
bus 由 board 启动期注册一次 (platform_i2c_bus_register), client 由具体外设驱动构造期填好 (启动期上层调一次拿到 bus 句柄, 挂进 client.bus 字段)。GPIO 没这个问题: 一个 pin 编号已经唯一定位一个引脚, 不存在“挂在哪个 GPIO 控制器上“的二层关系 (内核里其实有 gpio_chip, 但应用层基本不感知)。
二层抽象本身和 OS 无关: 工业项目里
struct platform_i2c_bus_device通常带一个osMutex字段, 解决“多线程多 client 抢同一 bus“的并发问题。教学版单线程跑, 去掉 mutex, 保留 bus + client + msg 三个 struct 即可 —— 二层是设计抽象, mutex 是 OS 落地, 两件事分开看。读者读教学版时把 mutex 想象不存在, 机制本身完全成立; 真上 RTOS / Linux 多线程时把 mutex 加回来, 调一行 osMutexAcquire / osMutexRelease 包住 master_xfer 即可, 三个 struct 字段不动。
15.17.3 三个核心 struct + ops
ch15 教学版 platform_i2c.h 升级到 bus + client 二层后的核心三件:
/* oop-in-c/code/15-platform/platform/platform_i2c.h, 教学简化版,
签名和工业项目的 platform_i2c.h 对齐 */
#define PLATFORM_I2C_WR 0x0000
#define PLATFORM_I2C_RD 0x0001
#define PLATFORM_I2C_NO_START 0x0002
struct platform_i2c_msg {
uint16_t addr; /* 7-bit 从机地址 */
uint16_t flags; /* WR / RD / NO_START */
uint16_t len;
uint8_t *buf;
};
struct platform_i2c_bus_device_ops {
uint32_t (*master_xfer)(struct platform_i2c_bus_device *bus,
struct platform_i2c_msg *msgs, uint32_t num);
/* 工业版还有 slave_xfer / control, 教学版省略 */
};
struct platform_i2c_bus_device {
const struct platform_i2c_bus_device_ops *ops;
/* 工业版还有 osMutex 锁 + parent device, 教学版省略 */
};
struct platform_i2c_client {
struct platform_i2c_bus_device *bus; /* 我挂在哪条总线 */
uint16_t client_addr; /* 我是哪片 (例如 0x48) */
};
led_i2c 子类内嵌一个 struct platform_i2c_client, 启动期调 led_i2c_init(me, name, bus, 0x20, 0x01) 把 bus 句柄 + 客户端地址 + 控制寄存器一次填好。每次 led_on / led_off 拼一段 msg 走 platform_i2c_transfer(self->client.bus, &msg, 1)。子类不直接碰 bus 控制器, 只通过 client 间接定位。
教学包 oop-in-c/code/15-platform/pc/ 端补了一份 platform_i2c_pc.c, 实现一个 pc_i2c_bus, 把 master_xfer 翻译成 stdout printf。platform_init 启动期调一次 platform_pc_i2c_init 把 bus 注册进 dispatcher, 之后 led_board_init 调 platform_i2c_bus_get 拿到 bus 句柄, 喂给 led_i2c_init(&s_led_net, "NET", i2c_bus, 0x3C, 0x00) 装配 client。led_on(g_led_network) 走父类 dispatch 进 i2c_on, 拼 msg 走 platform_i2c_transfer, 落到 PC 后端打出:
[NET] led_on -> I2C client_addr=0x3C reg=0x00
[I2C] addr=0x3C W len=2 data=00 01
第一行是子类层打出来的语义日志 (NET 灯亮, 走 0x3C 客户端 0x00 寄存器), 第二行是 bus 控制器层打出来的字节流 (寄存器地址 0x00 + 写入值 0x01 共 2 字节)。两行对应二层的两次 dispatch – 子类 -> bus, 第一眼跑 demo 就看到二层兑现的可视化输出。换成 STM32 真机, 第二行 printf 换成 HAL_I2C_Master_Transmit 一行, 子类源码字节级不动, 这就是二层抽象在跨平台移植上的代价 = 0。
15.17.4 应用层用例: 温度传感器 max31827 (脱敏后的工业代码)
工业项目里 max31827 这种温度传感器走 i2c 读 12-bit 温度。它持有 bus + 客户端地址, 一次 transfer 拼两段 msg:
/* 简化自工业项目里 max31827_temp_read 的真实实现 */
struct platform_i2c_msg msg[2];
uint8_t tx_buf[1] = { 0x00 }; /* 寄存器地址 = 0x00 */
uint8_t rx_buf[2];
msg[0].addr = dev->client.client_addr; /* 0x48 */
msg[0].buf = tx_buf;
msg[0].len = 1;
msg[0].flags = PLATFORM_I2C_WR;
msg[1].addr = dev->client.client_addr;
msg[1].buf = rx_buf;
msg[1].len = 2;
msg[1].flags = PLATFORM_I2C_RD;
uint32_t done = platform_i2c_transfer(dev->client.bus, msg, 2);
/* msg[0] 写寄存器地址, msg[1] 用 Repeated-Start 接读 2 字节温度数据.
* done == 2 表示两段都成功. */
两段 msg 一次 transfer 是 i2c 标准玩法 – write 寄存器地址 + Repeated-Start + read 数据。GPIO 没有这个东西: 你要读 GPIO 就直接 platform_pin_read(pin) 一行, 没有“先告诉对方我要读哪个寄存器“这一步。这就是 i2c 的 msg 数组语义为什么必须留出来。
15.17.5 这套设计 = Linux i2c 子系统的骨架
把上面三个 struct 名字打开看, 你会发现一件让人发笑的事:
struct platform_i2c_bus_device= Linuxstruct i2c_adapter
struct platform_i2c_client= Linuxstruct i2c_client
struct platform_i2c_msg= Linuxstruct i2c_msg连 “client” 这个命名都是直接借 Linux 的。写嵌入式 i2c 驱动的人, 学的就是 Linux i2c 子系统的骨架。
master_xfer 这个函数名也是 Linux 的: struct i2c_algorithm 里有一个 int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num), 工业 platform 层和 ch15 教学版的签名一字不差, 就少了 struct i2c_algorithm 这一层封装 (Linux 把 ops 表抽到独立的 i2c_algorithm 结构体里, 一个 algorithm 可以被多个 adapter 复用; 工业版省了这一层, 直接把 ops 表挂到 bus 上)。
ch11 已经看过这套对应 (RT-Thread gpio_chip vs Linux gpio_chip), ch18 / 附录 C 还会再次看到 (Linux i2c 子系统的内核驱动如何通过 i2c_register_driver 挂上 i2c_adapter)。本书的“工业代码 = Linux 内核子系统骨架“主线在 i2c 这一层兑现得最直白: 不需要任何类比, 字段一一对应。
把镜头切到 Zephyr 也是同一回事。Zephyr 的 i2c 抽象在 include/zephyr/drivers/i2c.h, 核心 ops 表叫 struct i2c_driver_api, 6 个核心函数指针 + 2 个条件编译可选: configure / get_config / transfer / target_register / target_unregister / recover_bus。transfer 对应教学版的 master_xfer, 签名 int (*transfer)(const struct device *dev, struct i2c_msg *msgs, uint8_t num_msgs, uint16_t addr) 几乎一字不差; target_register / target_unregister 是 i2c 从机角色 (Linux 走 i2c_register_driver 走的也是这一套 client 注册路径); recover_bus 是 i2c 总线 hang 死之后的恢复入口, Linux 走 i2c_recover_bus。命名拉成对照表:
| 教学版 (ch15) | Zephyr i2c device | Linux i2c subsystem |
|---|---|---|
struct platform_i2c_bus_device | const struct device * (i2c controller) | struct i2c_adapter |
struct platform_i2c_client | i2c target (从机角色经 i2c_target_register) | struct i2c_client |
struct platform_i2c_msg | struct i2c_msg | struct i2c_msg |
master_xfer | i2c_driver_api.transfer | i2c_algorithm.master_xfer |
Zephyr 把 i2c 抽成两层 (controller / target) 和 Linux i2c subsystem (adapter / client) 思路一致, 只是命名不同, 都是教学版 i2c 二层抽象的工业级版。Zephyr i2c device 的完整工程跑法见附录 B。
15.17.6 spi 也是同款二层
最后顺手点一句, 不展开:
spi 也是 bus + device 二层 (一颗 MCU 1-4 条 SPI bus, 每 bus 挂多个 cs 片选下的设备)。机制和 i2c 同源 – 共享 SCK / MOSI / MISO 线, 用片选区分挂在 bus 上的多颗芯片。完整接口工业项目里有一份 platform_spi.h, 字段一一对照 Linux struct spi_master / struct spi_device。
那 12 个外设里, 只有 i2c 和 spi 是二层。其他全是单层 – pin / pwm / uart / adc / hwtimer 这些都不存在 “一条总线挂多颗芯片” 的物理结构。看清楚二层只在 bus 类外设上需要, 你就抓到了 platform 层抽象的完整光谱: 大部分外设单层就够, 只有总线类外设升二层。
下一章
你的框架完整了。但它只隔离了主板的变化(同一份应用,三种 LED 硬件混搭)。
子类里这一行 platform_gpio_write(self->pin, self->on_level) 落到底,还是 STM32 的 BSRR、Linux 的 sysfs、瑞萨的 DR 寄存器。硬件名字一变,这一行就要重写。
主板的变化,LED 层隔离了。芯片的变化,谁来隔离?
下一章揭穿。同一招用第二次。