第 3 章 · 你用 C 手搓了一个 class · 句柄与操作函数
配套代码:oop-in-c/code/03-handwritten-class/
3.1 一个真实场景
第 2 章你给 LED 模块的字段标了 /* private */、把内部工具函数加 static 锁进了 .c。同事改不动你的数据,你松了一口气。
下班前 PM 走过来:明天加一个电机控制模块。
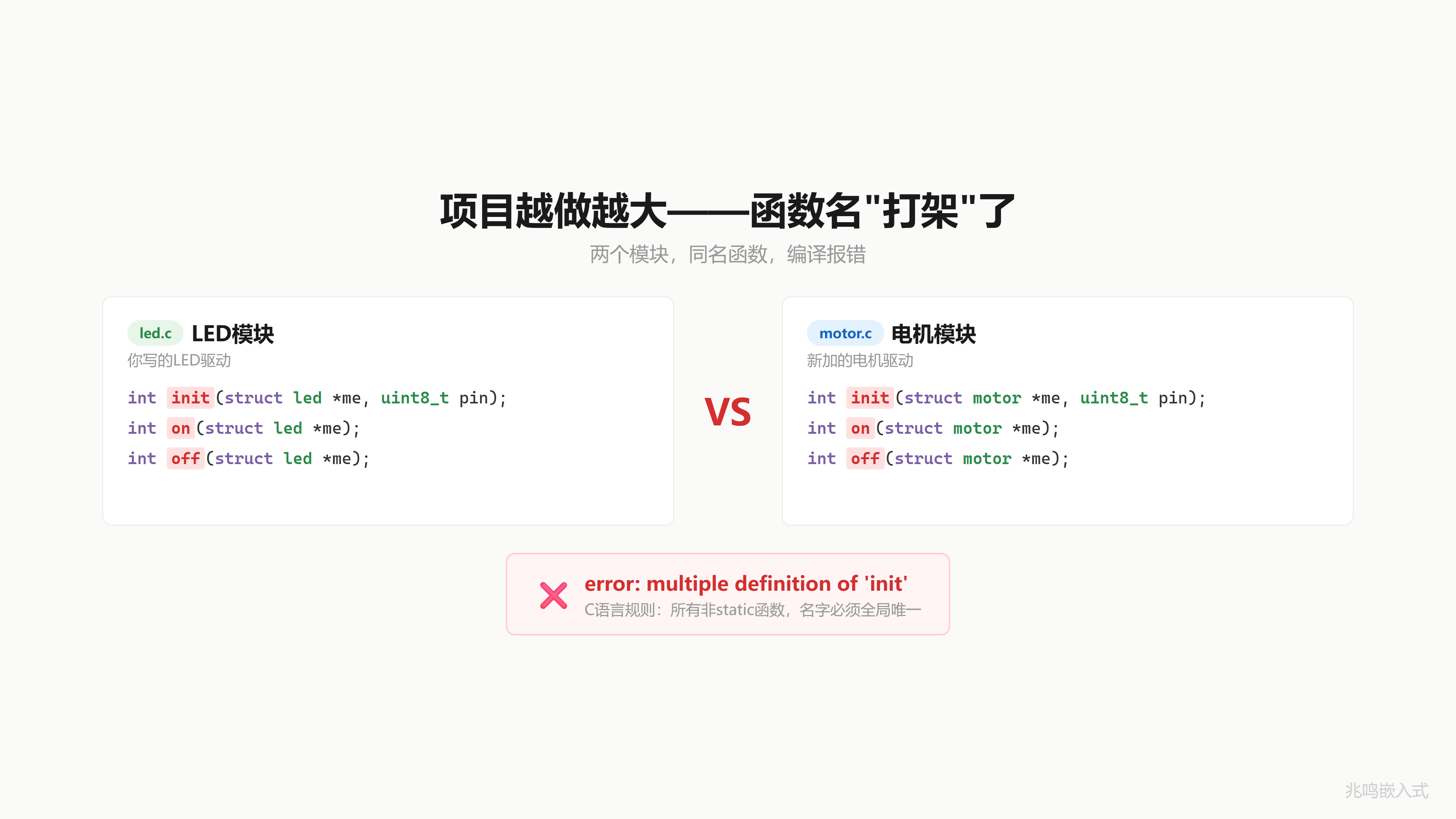
简单。新建 motor.c,按惯例写三个函数:
int init(struct motor *me, uint8_t pin) { ... }
int on(struct motor *me) { ... }
int off(struct motor *me) { ... }
编译。报错:
ld: motor.o: in function `init':
multiple definition of `init'; led.o:led.c:42: first defined here
你的 LED 模块也有 init / on / off。两个 init、两个 on,链接器问你这俩到底谁是谁。
你的 init 是配 GPIO 的,他的 init 是配 PWM 的。但 C 的链接器不管你做什么,只看名字。名字一样,打架。
C 有一个底层规则:所有不加 static 的函数,名字必须全局唯一。这叫外部链接(external linkage),是 ANSI C 标准定的。一个函数加了 static 它就是文件私有(第 2 章 2.6.2 节讲过)。不加 static,它进全局符号表,全工程范围内不能重名。
项目只有一个模块的时候没问题。两个模块、三个、十个,名字迟早撞。
3.2 沙县小吃和兰州拉面
你去吃过沙县小吃。
菜单上写:沙县拌面、沙县蒸饺、沙县炖罐。
隔壁兰州拉面:兰州牛肉面、兰州凉皮。
每道菜前面都带品牌名,分得清谁是谁。
函数也一样。LED 的函数全部 led_ 开头:
int led_init(struct led *me, uint8_t pin);
int led_on(struct led *me);
int led_off(struct led *me);
电机的函数全部 motor_ 开头:
int motor_init(struct motor *me, uint8_t pin);
int motor_start(struct motor *me);
int motor_stop(struct motor *me);
清清楚楚,互不干扰。看到 led_on,就知道是 LED 模块的。前缀是品牌名。

第 1 章和第 2 章其实已经在用 led_ 前缀,只是没明说“这是命名规范“。这一章把它确立为工程纪律。
3.3 三个月后你还知道哪个先调吗
前缀加好,编译过,项目正常运行。快进三个月。
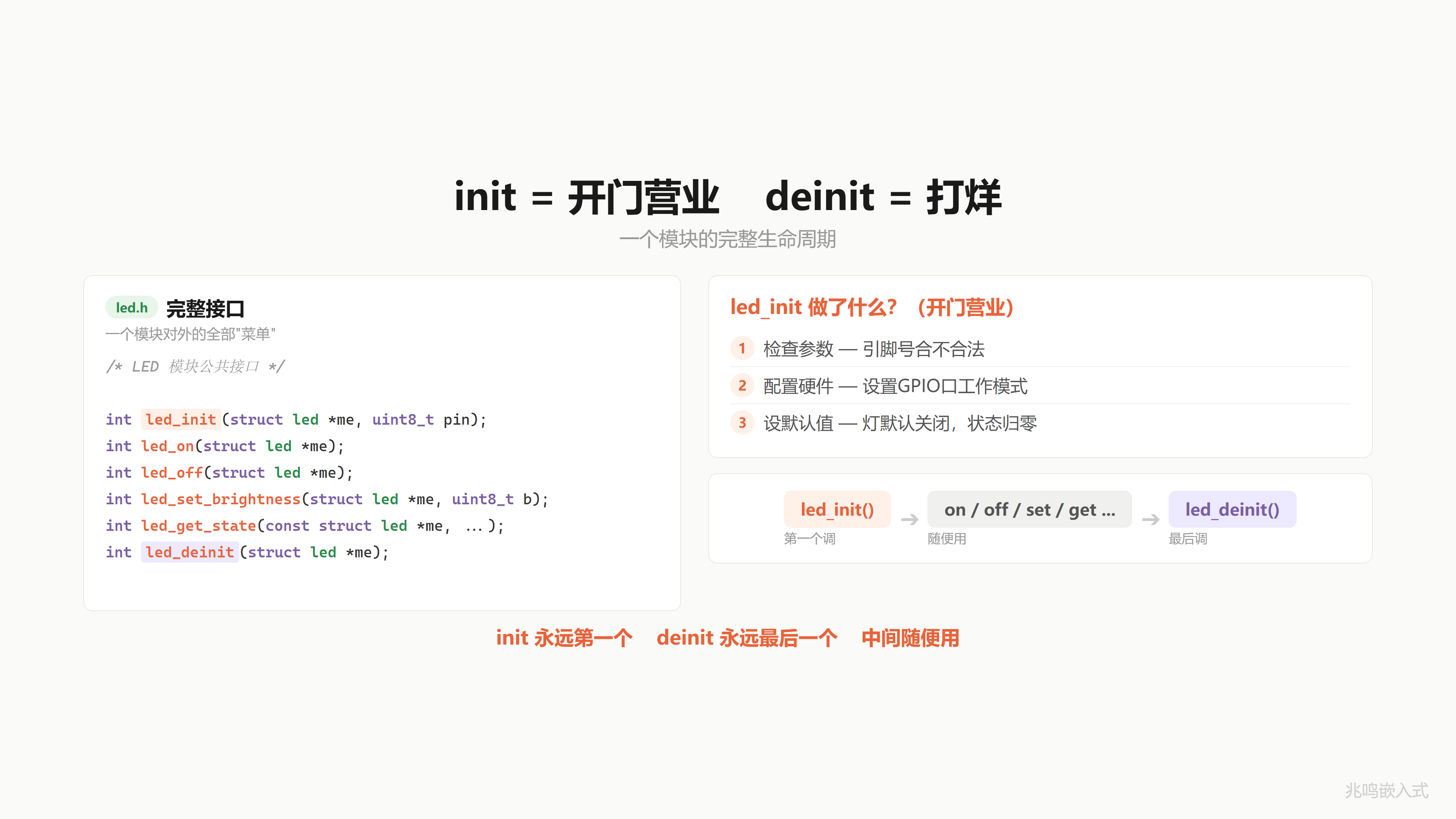
你打开自己写的 led.h,上面六个函数:
led_init
led_deinit
led_on
led_off
led_set_brightness
led_get_state
先调哪个?
你想了想,直接调 led_on 试试。
灯不亮。没报错,就是不亮。
翻了十分钟代码才想起来:要先调 led_init。因为 init 里面做了引脚配置。不 init,struct 里的 pin 是栈上的随机值(可能是 42,可能是 65535),反正不是你要的。
三个月前写的代码,现在跟看别人写的一样。不对,看别人写的至少还能骂两句,自己写的只能骂自己。
3.4 名字自带说明书
怎么让三个月后的自己也能一眼看懂?
答案藏在函数名里。
led_init 这个名字告诉你:这是第一个该调的。它做三件事:
int led_init(struct led *me, uint8_t pin)
{
if (!me)
return -1;
if (!pin_valid(pin))
return -2;
/* 1. 硬件配置 */
platform_gpio_init(pin, GPIO_MODE_OUTPUT);
/* 2. 默认状态 */
me->pin = pin;
me->brightness = 0;
me->is_on = false;
me->initialized = true;
/* 3. 同步硬件 */
update_hardware(me);
return 0;
}
参数校验、硬件初始化、默认状态。这三步合起来就是 C++ 里的构造函数(constructor)。
led_deinit 这个名字告诉你:这是最后调的。关硬件、释放资源。这就是 C++ 的析构函数(destructor)。
init 永远第一个,deinit 永远最后,中间的 on / off / set_brightness 随便用。
led_init 和 led_deinit 这两个名字本身就是说明书。好的门把手不用贴“推“或“拉“,形状本身告诉你怎么用。代码命名是同一个道理。
到这里:一个 .h 放接口声明、一个 .c 放实现、所有函数带前缀、init 开头 deinit 收尾。这就是一个完整的模块。
3.5 这个东西叫什么
你刚才做的这件事,给函数加前缀让名字不冲突,用 init 管诞生,用 deinit 管消亡,一个 .h 配一个 .c,这就是一个完整的 C 语言“类“。
struct 是数据,函数是行为,前缀是类名,init 是构造,deinit 是析构。
你不是从我这里背了一个定义,是从一个具体痛点(两个模块函数名打架)出发,自己推出了“前缀做类名 + init/deinit 做生命周期“这套规范。
这套规范在 Linux 内核、glibc、FreeRTOS、Zephyr 里全都用。读 kref_init / kref_get / kref_put 你立刻知道这是引用计数模块的生命周期函数。读 xQueueCreate / xQueueSend / xQueueReceive 你立刻知道这是 FreeRTOS 的队列模块。前缀 + init / deinit / 操作 是 C 圈子事实上的“class“ 写法。
3.6 C 对 C++
如果学过 C++,你会写:
class Led {
public:
Led(uint8_t pin); /* 构造函数 */
~Led(); /* 析构函数 */
int on();
int off();
private:
uint8_t pin_;
bool is_on_;
};
Led red(13); /* 进入作用域时自动调构造 */
red.on();
/* 离开作用域时自动调析构 */
而 C 里写的:
struct led {
uint8_t pin;
bool is_on;
};
int led_init(struct led *me, uint8_t pin);
int led_deinit(struct led *me);
int led_on(struct led *me);
int led_off(struct led *me);
struct led red;
led_init(&red, 13);
led_on(&red);
led_deinit(&red);
做的是一模一样的事。
C++ 把你手动写的前缀变成了编译器管理的类名(namespace 命名空间 + 名字混淆 name mangling,本节末 3.6 / 3.7.4 节会展开)。把你手动写的 init / deinit 变成了对象创建 / 销毁时自动调用的构造和析构。
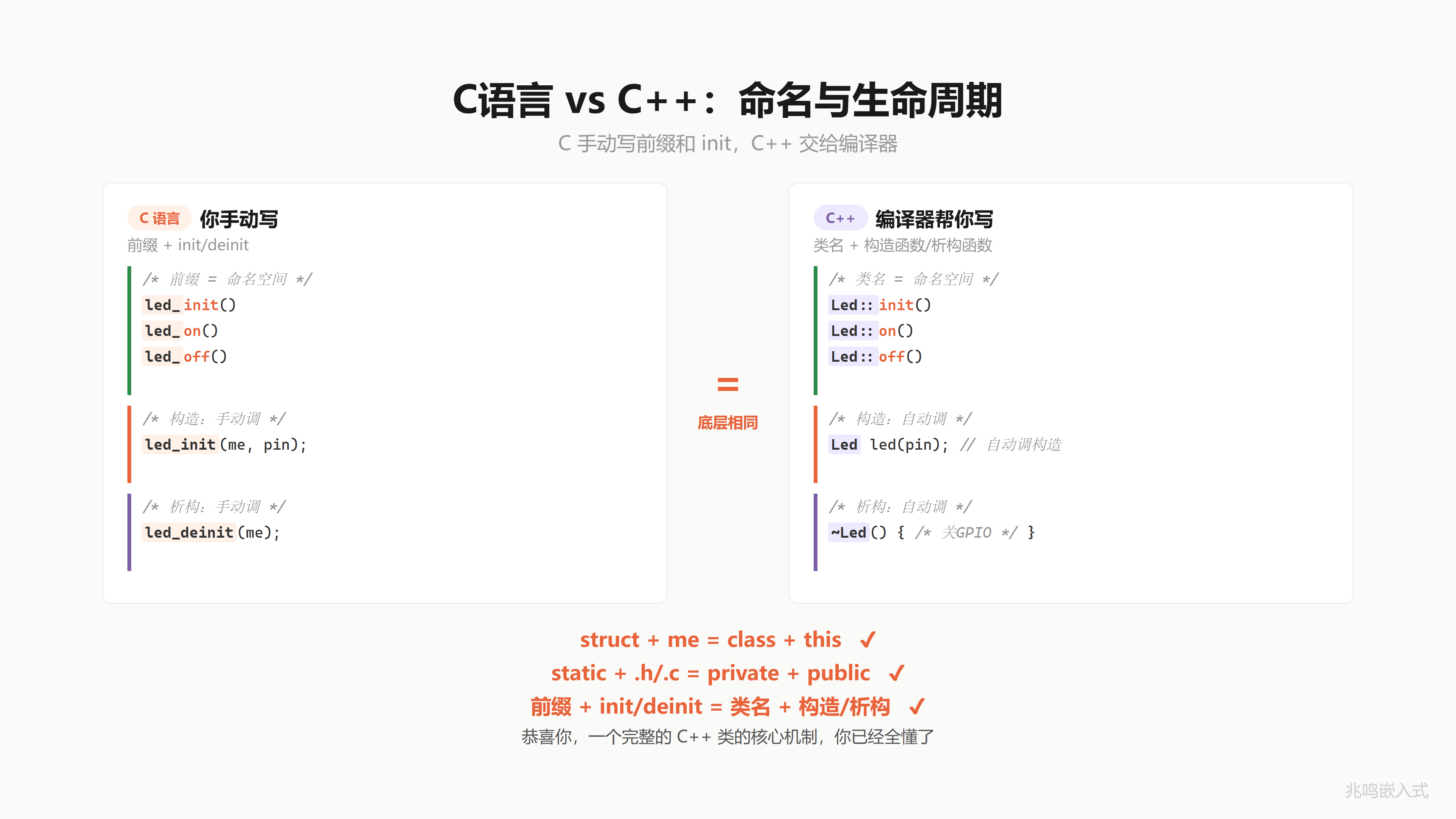
到这里三个恒等都凑齐了:
| 章节 | C 语言 | C++ |
|---|---|---|
| 第 1 章 | struct + me | class + this |
| 第 2 章 | .h 声明 + static + /* private */ 纪律 | public + private |
| 第 3 章 | 前缀 + init/deinit | 类名 + 构造/析构 |
第 2 章那一行展开看:.h 里声明的函数(led_init / led_on / led_off / ...)等同 C++ 的 public:;.c 里加 static 的工具函数 + struct 字段挂 /* private */ 的命名纪律,等同 C++ 的 private:。一份 C 模块用 .h / .c 分离 + static 锁 + 字段命名纪律三件事,做的就是 C++ public / private 关键字一字不差的事。
C 没有 class?你天天都在写。
3.7 视频里没讲透的几个细节
3.7.1 initialized 标志位的反事实推演
struct led 和 struct motor 都有一个 bool initialized; 字段。这不是装饰,是防“没 init 就用“的安全网。
struct motor uninit = {0}; /* 全部清零,包括 initialized */
motor_start(&uninit);
{0} 把整个 struct 清零,所以 initialized 是 false。motor_start 第一件事检查这个标志:
int motor_start(struct motor *me)
{
if (!me)
return -1;
if (!me->initialized)
return -3;
...
}
立刻返回 -3,不去操作未配置的硬件。
如果没这个标志,未初始化的 motor 拿着垃圾 pin 去操作 GPIO,行为完全不可预测。在工业控制板上这是能引发安全停止的 bug。
工业代码里所有公开 API 的对象都有类似的“哨兵字段“(sentinel:用一个字段记录对象状态,让所有公开函数先查这个字段判断对象是否可用):FreeRTOS 的 TCB.uxBasePriority 检查、Linux 内核的 device.driver_data 检查、Linux 的 kref 计数检查,全是同一套防御。
3.7.2 为什么 C 不能像 C++ 那样自动调用构造函数
C 的设计哲学是“你写什么就执行什么,没有隐式动作“。
struct led red; 这一行只分配栈内存,编译器不偷偷调任何函数。
C++ 的 Led red(13); 编译器自动插入一句构造函数调用,实际是编译器在帮你写代码。
这件事在嵌入式领域有争议。有人觉得方便(少打字、漏 init 的 bug 少),有人觉得“看不见的代码“是 bug 温床(栈对象多到对象池满了你都不知道)。Linus Torvalds 在邮件里反复抨击 C++ 的隐式行为,Linux 内核坚持纯 C 部分原因在这。
工业代码里两种风格都有人用。本书后面章节统一手动 init / deinit,看得见。
3.7.3 前缀和链接器符号表的视角
编译器其实不知道“前缀“这个概念,只看完整函数名。led_init 和 motor_init 在符号表里就是两个完全独立的符号:
$ nm led.o
0000000000000000 T led_init
0000000000000098 T led_deinit
0000000000000114 T led_on
...
$ nm motor.o
0000000000000000 T motor_init
0000000000000098 T motor_deinit
0000000000000114 T motor_start
...
链接器看到 led_init 和 motor_init 是两个不同字符串,相安无事。
但人需要前缀分组。led_* 一类、motor_* 一类,认知负载小。这是把链接器规则(全局唯一)和人的认知(按模块分组)调和的工程妥协。
C++ 的 namespace 在编译时把 Led::init 改写成 _ZN3Led4initEPh 这样的混淆名(叫 name mangling),本质和你手动写 led_init 一回事,只是编译器替你操作了字符串。
3.7.4 命名规范决策
你可能见过这些变体,本书选择是这样:
| 变体 | 例子 | 评价 |
|---|---|---|
led_init / led_deinit | 本书 | 简洁,对称 |
led_init / led_destroy | 部分库 | destroy 暗示堆分配 |
led_open / led_close | POSIX 风 | 留给文件接口 |
LedInit / LedDeinit | 微软 / Cube 风 | 不是 Linux 内核风 |
Led::Init / Led::Deinit | C++ | 编译器代劳 |
工业代码里 module_action 这种 lowercase + underscore + _ 分隔的写法是 Linux 内核风格的标准,本书坚持这一种。
3.7.5 链接器冲突的真实长相
led.c 里写一个 init,motor.c 里也写一个 init,编译两个 .o 文件的时候各自都过。gcc led.c motor.c -o demo 在链接阶段才炸:
$ gcc -c led.c # 单文件编译过
$ gcc -c motor.c # 单文件编译过
$ gcc led.o motor.o -o demo
ld: motor.o: in function `init':
motor.c:(.text+0x0): multiple definition of `init';
led.o:led.c:(.text+0x0): first defined here
collect2: error: ld returned 1 exit status
错误是 ld(链接器)抛出的,不是 gcc。原因在 nm:
$ nm led.o
0000000000000000 T init <-- 全局符号 init
00000000000000a0 T led_on
0000000000000120 T led_off
$ nm motor.o
0000000000000000 T init <-- 也是全局符号 init
00000000000000a0 T motor_start
两个 .o 都把 init 写进自己的全局符号表(大写 T)。链接器扫所有 .o 合并符号表,发现两个 init 不知道挑谁,直接报 multiple definition。
加前缀的方案改成这样:
$ nm led.o
0000000000000000 T led_init <-- 不冲突
00000000000000a0 T led_on
$ nm motor.o
0000000000000000 T motor_init <-- 不冲突
00000000000000a0 T motor_start
每个全局符号都唯一了,链接器开心。
另一种规避冲突的方式是给 init 加 static,让它退化成 file-local 符号(nm 里小写 t)。但这样 init 就不能跨文件调用了,main.c 里 led_init(...) 直接编译报 undefined reference。static 解决冲突的代价是失去外部接口。
工业上选前缀不选 static 的原因清楚了:要让外部模块能 led_init(...),又不能撞名,加前缀是唯一的路。
3.7.6 前缀方案 vs 嵌套方法表方案
C 语言的“避免冲突“还有第二条路。有些项目走的不是前缀,而是嵌套方法表。形态像这样:
struct led_class {
int (*init)(struct led *me, uint8_t pin);
int (*deinit)(struct led *me);
int (*on)(struct led *me);
int (*off)(struct led *me);
};
extern const struct led_class led; /* 单例方法表 */
/* 调用 */
led.init(&red, 13);
led.on(&red);
所有“led 模块的方法“挂在一个 struct led 单例下,调用是 led.init(...)、led.on(...)。链接器看到的全局符号只有一个 led,撞不到 motor。
这种写法的优点是把“模块名 + 方法名“在语法上分开了,看上去更像 OOP 的 instance.method()。GTK 的 GObject、Lua 的 C API 都用过类似手法。
缺点也实在。每次调用多一次内存间接(要从 led 单例里读函数指针),现代 CPU 上影响不大但也不是零。函数指针不能内联,编译器也不容易做静态分析。最关键的是这种写法在 C 圈的辨识度低:99% 的工业 C 代码(Linux 内核、Zephyr、FreeRTOS、glibc)走前缀方案。新人接手嵌套方法表的代码,很容易看不出“这是个普通的工程模块“。
本书坚持前缀方案,原因有三:
- 和 Linux 内核 / Zephyr / FreeRTOS / RT-Thread 一致
- 调用是直接函数调用(
BL led_init,一条指令),不走函数指针 - 工业代码静态分析工具(PCLint / Coverity)对直接调用支持更好
到了 ch09-ch11 会引入 ops 表 + vptr,那是嵌套方法表的“工业级正确用法“:用来支持运行时多态,不是用来规避命名冲突。两件事不要混。
3.7.7 为什么 motor 多了 direction 和 state 字段
struct motor 字段是 pin / pwm_duty / direction / state / initialized,比 struct led 多了 direction 和 state。
电机和 LED 的状态量本来就不一样:
- LED 只有“开 / 关“两态,加一个亮度(对应硬件 PWM 占空比)。
- 电机有“停 / 正转 / 反转“三态,加一个速度(PWM 占空比),方向是独立维度。
所以 direction 是布尔(正反),state 是 enum(停 / 正 / 反)。两者一起描述电机的运行状态。
字段不是越多越好。每加一个字段就是一份要维护的状态。is_on 这种“瞬时状态“和 initialized 这种“生命周期状态“放一个 struct 里都没问题,因为它们是同一个 motor 的属性。但如果你想塞“上次启动时间“、“累计运行小时”、“电流采样平均值“这些,那是另一个层次的数据(运维 / 监控),属于另一个模块的职责。
第 4 章数据归位会讲清楚这件事。
3.8 你现在的代码在 STM32 上长什么样
PC 模拟版是 printf 假装操作 GPIO。STM32 真实硬件上长这样(节选自 oop-in-c/code/03-handwritten-class/platform-mcu/stm32/led_motor_stm32.c,pin 仍是 PIN_NUM('A', 13) 编码,详见第 1 章 § 1.x PIN_NUM 编码):
#include "platform.h"
#include "stm32f4xx_hal.h"
void platform_gpio_init(uint8_t pin, uint8_t mode)
{
GPIO_InitTypeDef cfg = {0};
_enable_port_clock(pin);
cfg.Pin = PIN_MASK(pin);
cfg.Mode = (mode == GPIO_MODE_OUTPUT) ?
GPIO_MODE_OUTPUT_PP : GPIO_MODE_INPUT;
cfg.Pull = GPIO_NOPULL;
cfg.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(PIN_PORT(pin), &cfg);
}
void platform_gpio_write(uint8_t pin, bool value)
{
HAL_GPIO_WritePin(PIN_PORT(pin), PIN_MASK(pin),
value ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
led.h / led.c / motor.h / motor.c / main.c 全部一字不改。两个模块照样跑,前缀照样区分得开。变化的只是这层 platform 胶水。
真实工程里电机的 PWM 速度控制会写到 TIM 通道的 CCRx 寄存器,这里教学简化为 GPIO 高低电平。第 5 章会展开 HAL 怎么做这种映射。
这一节用的是函数式包装的 platform 抽象,是教学简化版。真正工业级用虚函数表(ops 表),允许 runtime 切换平台。第 16 章会把 platform 层从函数式升级成 ops 表式(gpio_chip 子系统)。
3.9 工业代码里的模块长什么样
我做的工业控制板项目里,每个驱动模块都按这套命名规范组织。看几个真实模块的 .h 列名:
drivers/
├── led/
│ ├── led_base.h 类型 led_base_t
│ └── led_gpio.h 类型 led_gpio_t · 函数 led_gpio_init
├── eeprom/
│ ├── eeprom_base.h 类型 eeprom_base_t · 函数 eeprom_read / eeprom_write
│ └── ds2433.h 类型 ds2433_t · 函数 ds2433_init
├── temp_sensor/
│ ├── temp_sensor_base.h 类型 temp_sensor_base_t
│ └── max31827.h 类型 max31827_t · 函数 max31827_init
├── fan/
│ ├── fan_base.h
│ └── fan_pwm.h
└── beeper/
├── beeper_base.h
└── beeper_pwm.h
每个模块都遵循同一个套路:
- 文件名前缀 = 模块名(
led_/eeprom_/temp_sensor_/fan_/beeper_) - 函数名前缀 = 模块名 + 动作(
led_on/eeprom_read/max31827_init) - 生命周期 =
xxx_init / xxx_deinit - 类型名 =
xxx_t(这是工业项目历史决定,本书统一用struct xxx)
xxx_base 是抽象父类(属于第 6 章继承的内容),xxx_gpio / ds2433 / max31827 是具体实现。这层结构对应“虚函数表 + 具体设备的 ops 表“,是第 9 章到第 11 章的内容。
到这里你能看出:你这一章学的命名规范,是工业代码的“地基“。50 个驱动文件全按这个规范命名,新人接手不用读所有文档,看文件名 + 函数名就知道哪个是哪个。
3.10 跑一遍
cd oop-in-c/code/03-handwritten-class/pc
make
./demo
输出节选:
========================================
Same pattern, two classes side by side.
========================================
--- led_init / motor_init: open for business ---
[GPIO] Pin13 init as OUTPUT
[GPIO] Pin13 -> LOW (OFF)
[LED] Pin13 initialized
[GPIO] Pin14 init as OUTPUT
[GPIO] Pin14 -> LOW (OFF)
[LED] Pin14 initialized
[GPIO] Pin5 init as OUTPUT
[GPIO] Pin5 -> LOW (OFF)
[MOTOR] Pin5 initialized
--- LED operations ---
[GPIO] Pin13 -> HIGH (ON)
[LED] Pin13 ON
[GPIO] Pin13 -> HIGH (ON)
[LED] Pin13 brightness set to 80%
--- Motor operations ---
[GPIO] Pin5 -> LOW (OFF)
[MOTOR] Pin5 duty set to 60%
[MOTOR] Pin5 direction = forward
[GPIO] Pin5 -> HIGH (ON)
[MOTOR] Pin5 start (forward, duty=60%)
--- Skip init: catch the mistake at API level ---
[MOTOR] Error: not initialized
motor_start(uninit) returned -3 (-3 = not initialized)
--- Out-of-range arguments rejected ---
[LED] Error: pin 200 out of range (0~31)
led_init(_, 200) returned -2 (-2 = pin out of range)
led_* 和 motor_* 在同一个 main.c 里跑,没有任何冲突。init 失败有 -1 / -2 区分(NULL 指针 / 参数超范围),initialized 标志位拦住了“没 init 就用“的错误(返回 -3)。
这就是一个工程纪律完整的 C 模块该有的样子。
3.11 视频回放
想听口播版的可以看 B 站这一期视频:
视频里讲了沙县小吃 / 兰州拉面的类比、门把手的 affordance 类比,节奏更紧凑。书里补了视频没讲透的 6 个细节(3.7 节)和工业代码的对照(3.9 节)。
下一章
到这里 LED 和 motor 都是“工程纪律完整的模块“了。但回头看 led.c 文件开头,你可能还有几个全局变量:累计 init 次数、调试开关、最大亮度常量。
这些全局变量都该死了。下一章把它们一个一个判刑。