第 4 章 · 你的全局变量该死了 · 数据三级分类
配套代码:oop-in-c/code/04-data-classification/
4.1 一个真实场景
你的 .c 文件开头有几个全局变量?
数一数。
今天它们一个都活不了。
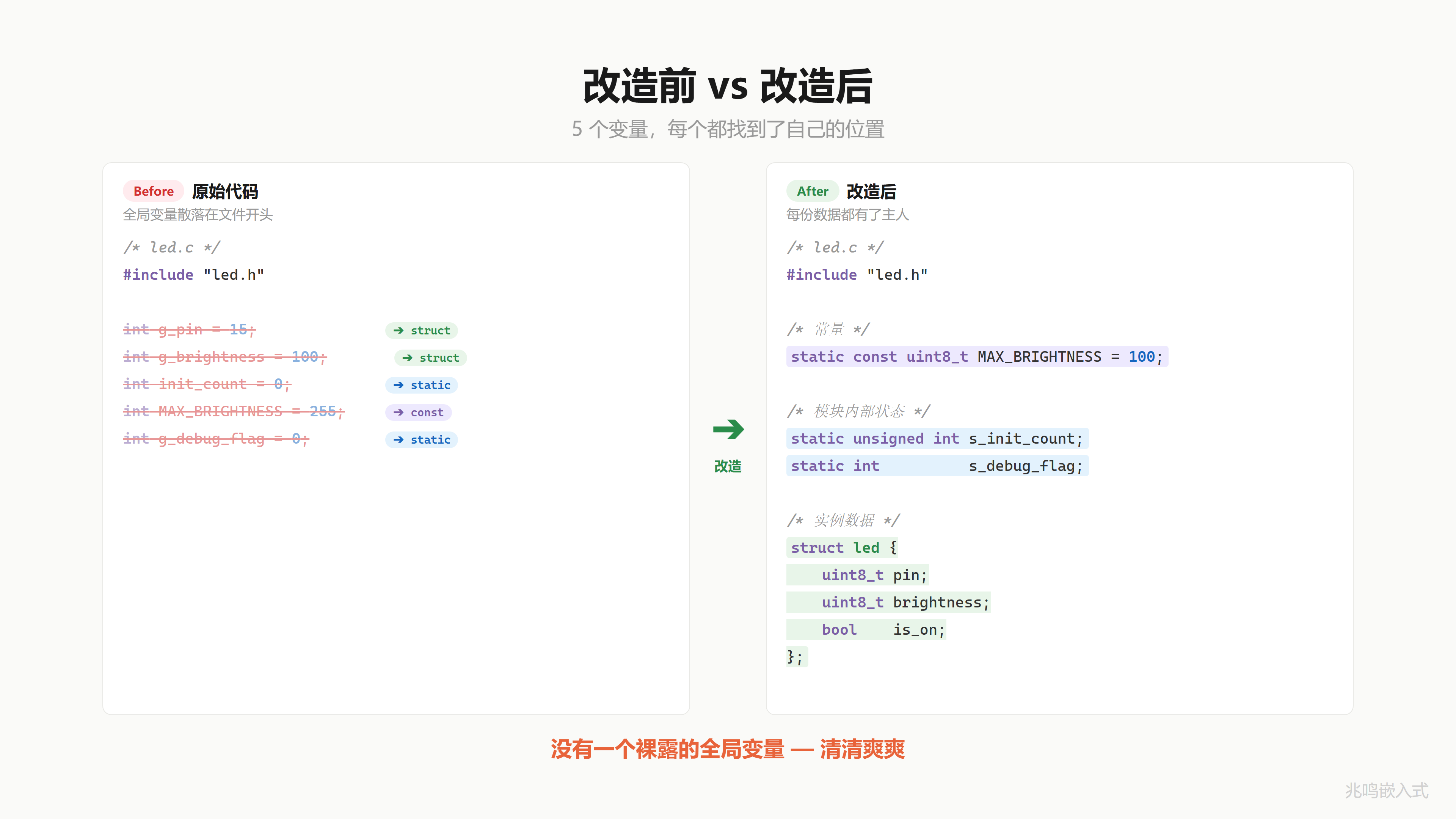
第 1 章到第 3 章做了不少事。挂号单(struct)、me 指针、字段标 /* private */ + 工具函数加 static、命名前缀、init/deinit 生命周期。但翻开你的 led.c 看头几行,可能还在躺着这种东西:
/* led_bad.c · 反面教材 */
#include "led.h"
int g_pin = 0;
int g_brightness = 0;
int init_count = 0;
int MAX_BRIGHTNESS = 255;
int g_debug_flag = 0;
五个全局变量,从项目第一天就躺在这里。你可能觉得没问题。来看一个 bug。

你创建了两个 LED:红灯用引脚 5,绿灯用引脚 3。代码这样写:
bad_led_init(5); /* 初始化红灯 */
bad_led_init(3); /* 初始化绿灯 */
bad_led_on(); /* 想点亮红灯 */
跑一遍。
[BAD_LED] Pin5 initialized (g_pin=5, init #1)
[BAD_LED] Pin3 initialized (g_pin=3, init #2) <-- g_pin 从 5 变成 3
[BAD_LED] Pin3 ON <-- 点亮的是绿灯
红灯不亮,绿灯亮了。
第二次 bad_led_init(3) 把 g_pin 从 5 覆盖成 3。之后 bad_led_on() 用的是 g_pin,操作的实际是绿灯的引脚。
我接手过一个工业项目,两路传感器也是这个毛病:两个通道共享一个 g_chan_id,前面的人图方便。新人调试一周才找到原因。

全局变量像公司大厅的白板。谁路过都能改两笔。你写了个重要数据,转头一看,被别人擦了。
4.2 第一批 · 实例数据搬进 struct
今天分三批处理掉。
第一批:g_pin 和 g_brightness。
引脚号和亮度,红灯有红灯的,绿灯有绿灯的。它们属于每个 LED 实例自己的数据。
判决:搬进 struct led。
struct led {
uint8_t pin;
uint8_t brightness;
bool is_on;
bool in_use;
};
pin 和 brightness 进 struct,每个 LED 对象自己带着一份。红灯改红灯的 me->pin,绿灯改绿灯的 me->pin,谁也覆盖不了谁。
刚才那个 bug,不存在了。

4.3 第二批 · 模块共享数据加 static
第二批:init_count 和 g_debug_flag。
init_count 是模块级累计调 init 的次数,红绿两灯共用一个计数器。g_debug_flag 是模块内部的调试开关,控制 [LED-DEBUG] 这种打印。
它们都不属于某一个 LED 实例(不是实例数据),但也不该让别的文件看到(外部 extern int init_count; 一句话就能改坏)。
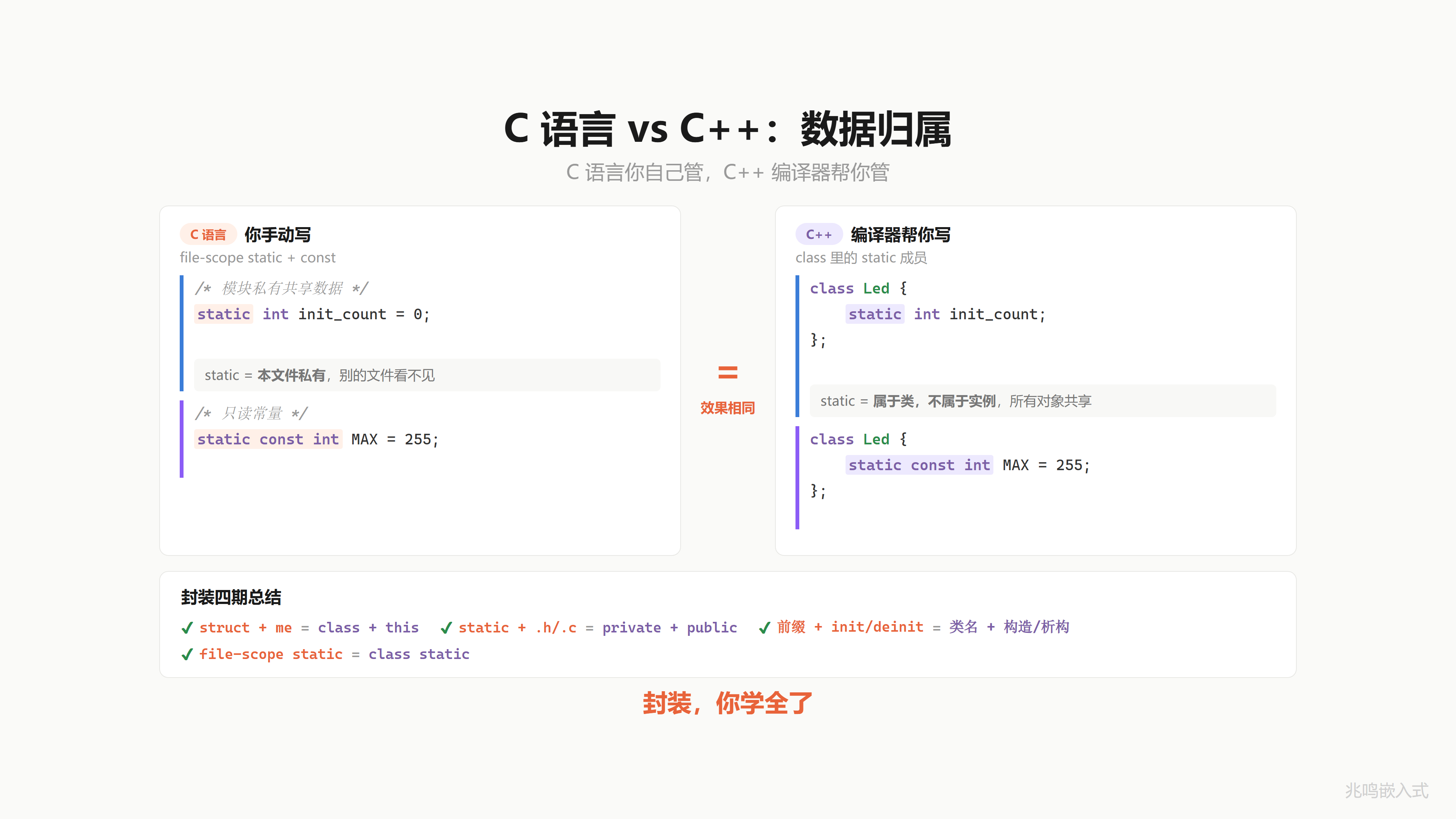
判决:前面加 static。
static unsigned int s_init_count; /* 模块累计 init 次数 */
static int s_debug_flag; /* 模块调试开关 */
static 这个修饰词让编译器把这两个变量的符号写成 file-local(第 2 章 2.6.2 节讲过链接器视角)。别的文件 extern 都找不到。
外部想知道 s_init_count?走函数:
unsigned int led_get_init_count(void)
{
return s_init_count;
}
数据的主人说了算。

static 这个词在 C 里有三种意思,前面用了两种(藏函数、藏文件作用域变量)。第三种是函数内部的 static 局部变量,4.7.4 节会讲。
4.4 第三批 · 只读常量加 const
最后一个:MAX_BRIGHTNESS。
最大亮度 100。从项目开始到现在,有人改过它吗?没有。它就是一个常量。
但 int MAX_BRIGHTNESS = 100; 写法上是可改变的变量。运行时谁手滑写一句 MAX_BRIGHTNESS = 0,亮度上限突然变 0,整个模块都不工作了。
判决:static const。
static const uint8_t MAX_BRIGHTNESS = 100;
static const uint8_t MAX_PIN = 31;
static 让它出不了文件,const 让谁都改不了。MAX_BRIGHTNESS = 0; 编译器直接报错 assignment of read-only variable 'MAX_BRIGHTNESS'。编译期防御,运行时零开销。

你可能习惯用 #define MAX_BRIGHTNESS 100。也行。但 static const 有几个好处:
- 有类型(
uint8_t而不是int),编译器查类型不一致 - 有作用域(
static限制在本文件),不污染全局名字空间 - 调试时能看到变量名(
#define是预处理替换,gdb 看不到)
工业代码两种都在用。本书坚持 static const。
4.5 改造全貌 · 数据三级归位
把三批合起来,led.c 文件开头长这样:
/* 第三类:只读常量 */
static const uint8_t MAX_BRIGHTNESS = 100;
static const uint8_t MAX_PIN = 31;
/* 第二类:模块共享数据 */
static struct led led_pool[LED_POOL_SIZE];
static unsigned int s_init_count;
static int s_debug_flag;
/* file-private 工具函数 */
static void update_hardware(struct led *me);
static bool brightness_valid(uint8_t brightness);
static bool pin_valid(uint8_t pin);
static void debug_print(const char *msg);
没有一个裸露的 int g_xxx。每一个变量都加了 static、static const 或者藏在 struct 字段里。这就是数据归位的核心:每一份数据都有它该呆的地方。
注意一个新东西:static struct led led_pool[LED_POOL_SIZE];。
这一章本章配套代码用的是静态对象池:固定大小的 led_pool[8] 数组,led_acquire 从池里取空槽,led_release 把槽位还回去。
struct led *led_acquire(uint8_t pin)
{
for (size_t i = 0; i < LED_POOL_SIZE; i++) {
struct led *me = &led_pool[i];
if (me->in_use)
continue;
me->pin = pin;
me->in_use = true;
...
return me;
}
return NULL; /* 池满 */
}
为什么本章演示用对象池而不是 ch02 的 malloc?因为对象池是一种把“模块共享数据“和“实例数据“绑在一起的合理写法:池本身是模块共享的(一份),槽位里的 LED 实例数据各自独立(多份)。这一章想把“实例 / 模块 / 常量“三类归位讲清楚,对象池正好把三者都凑齐。
对象池不是工业代码唯一答案。LED 这种数量固定的全局对象,更常见的写法是直接 static struct led red_led; 给每颗 LED 一个静态实例(ch04 配套代码的另一份样例)。生命周期不固定的对象(动态接收的数据包、临时事件、按需创建的会话),用 malloc(FreeRTOS heap_4 / heap_5、RT-Thread rt_malloc、状态机框架自带的事件池这一类 RTOS 提供的动态内存)。三种工具按场景选,4.7 节会展开。
4.6 这个东西叫什么
刚才你做的事,把全局变量按“实例 / 模块 / 常量“三类归位,这个动作软件工程里叫数据所有权(data ownership)或者数据归位。
每一份数据都得有主人。实例数据的主人是 struct 字段(跟着 me 走),模块共享数据的主人是 static 变量(关在文件里),常量的主人是 static const(编译期固定)。
数据没有主人,bug 就是主人。
费曼讲过一句话:好的设计不靠人小心,靠机制上不让错误发生。把数据按所有权归位,是机制层面的防御。第 2 章把字段标 /* private */ + 内部工具加 static 防外部乱写、第 4 章把全局变量按所有权归位防内部乱写,两条加起来是数据层面的“封装“完整版。

4.7 视频里没讲透的几个细节
4.7.1 实例数据 vs 模块共享数据,怎么分
判断标准只有一个:这份数据是 N 个实例各持有一份,还是 N 个实例共享一份?
| 数据 | 各持一份还是共享 | 归位 |
|---|---|---|
pin | 每个 LED 各一份 | struct 字段 |
brightness | 每个 LED 各一份 | struct 字段 |
is_on | 每个 LED 各一份 | struct 字段 |
| 累计 init 次数 | 整个 LED 模块共享一份 | static |
| 调试开关 | 整个 LED 模块共享一份 | static |
| 亮度上限 | 整个 LED 模块共享一份的常量 | static const |
判错了会怎样?
把“实例数据“误认为“模块共享数据“,就是 g_pin 那个 bug。两个 LED 共享一个 pin。
把“模块共享数据“误认为“实例数据“,那是把 s_init_count 放进 struct led。每个 LED 自带一份计数器,但你想要的是“全模块累计 init 次数“,得遍历所有 LED 加起来才能拿到。绕了路。
4.7.2 三种持有方式 · 按场景选
LED 实例数据放哪里?工业代码里有三种常见写法。
写法 A · 直接静态实例
static struct led red_led;
static struct led green_led;
led_init(&red_led, 13);
led_init(&green_led, 14);
数量固定的全局对象(板上 LED、串口、传感器、按键)几乎都这样写。零分配开销、零失败路径、地址编译期定死、调试器一查就找到。这是工业代码里最常见的形态。
写法 B · 静态对象池
static struct led led_pool[LED_POOL_SIZE];
struct led *me = led_acquire(13); /* 从池里拿一个空槽 */
...
led_release(me); /* 用完还回去 */
数量上限固定但具体哪些槽用、什么时候用不固定时用对象池。Linux 内核的 kmem_cache / slab 分配器是同一个思路的工业级形态。本章配套代码用这种写法是为了把“模块共享数据 + 实例数据“凑齐演示。
写法 C · 动态分配
struct led *me = malloc(sizeof(*me));
if (!me)
return -ENOMEM;
led_init(me, 13);
...
free(me);
MCU 上用 RTOS 提供的 heap:pvPortMalloc(FreeRTOS heap_4 / heap_5)、rt_malloc(RT-Thread)、k_malloc(Zephyr)。这些 heap 实现都有相邻块合并机制,碎片可控。生命周期不固定的对象(动态接收的网络包、临时事件、按需创建的会话)走这一种。我自己的 STM32H7 工业控制板项目里 configTOTAL_HEAP_SIZE = 65536、状态机框架的事件池预占几十 KB,全是动态内存机制。这是现代嵌入式工业级常态。
什么时候选哪种?
| 对象类型 | 推荐写法 |
|---|---|
| 数量固定的全局对象(LED / 串口 / 传感器) | A 直接静态实例 |
| 数量上限固定 + 频繁创建销毁(任务句柄池、连接池) | B 静态对象池 |
| 生命周期不固定的对象(动态包、按需事件、临时缓冲) | C 动态分配 + 生命周期纪律 |
| 单次分配永不释放(启动时 4 KB 帧缓冲) | A 静态 或 C 单次 malloc,都行 |
唯一真不能用动态内存的场景是 8051 / M0 + 16 KB RAM 这种小芯片,或者 DO-178C Level A / IEC 62304 Class C 早期严格规约(最新规约都允许有约束的动态内存)。绝大多数现代嵌入式项目(Cortex-M4 以上 + RTOS)都是三种工具按场景混用。
4.7.3 池满了怎么办
led_acquire 返回 NULL。调用方有义务处理:
struct led *red = led_acquire(13);
if (!red) {
/* 池满了,记日志 / 通知监控 / 降级处理 */
log_error("led pool exhausted");
return -ENOMEM;
}
工业代码里这种 NULL 检查是强制的,几乎没有“分配失败就忽略“的情况。Linux 内核 kmalloc 一样:每次分配后立刻判空,是内核驱动 review 的硬指标。
4.7.4 static 第三义 · 函数内部的 static 局部变量
static 这个词在 C 里有三种含义:
| 修饰位置 | 效果 | 例子 |
|---|---|---|
| 函数前 | 文件私有函数(file-private) | static void update_hardware(...) |
| 文件作用域变量前 | 文件私有变量(file-private) | static int s_debug_flag |
| 函数内局部变量前 | 跨调用保持值 | static int call_count |
前两种这一章和第 2 章用过。第三种是另一个话题:
void log_event(void)
{
static int call_count = 0;
call_count++;
printf("called %d times\n", call_count);
}
static int call_count 不在栈上,每次进函数它的值还是上次离开时的样子。它就是一个“绑定到这个函数的私有全局变量“。
工业代码里这种用法不多,因为它隐式地把“函数有状态“这件事藏起来了。明确的做法是把 call_count 移到 module-level static 变量,加一个 getter 函数。
记一句话:三种 static,活得比你想的久,藏得比你想的深。

4.7.5 .bss 段是什么
static struct led led_pool[8] 这个数组在哪里?
不在堆,不在栈。
它在 .bss 段。.bss 是可执行文件的一个段,专门给“未初始化的全局/静态变量“。
可执行文件结构(ELF / Mach-O / PE 都类似):
.text 代码段(指令)
.rodata 只读数据段(const 数据 / 字符串字面量)
.data 已初始化的全局/静态变量(int x = 5;)
.bss 未初始化的全局/静态变量(int x; 或 static int x;)
heap malloc 分配区(运行时增长)
stack 函数调用栈(运行时增长)
.bss 在程序启动时由 loader 全部清零(O(1),不用一字节一字节写,loader 用 zero-fill 页技巧)。所以 static struct led led_pool[8] 一开机就是 {0} 状态,每个 in_use 都是 false,可以直接用。
static const uint8_t MAX_BRIGHTNESS = 100 这种带初始值的常量在 .rodata 段。运行时这一段是只读的,CPU 写它会触发 segmentation fault / hard fault。const 不只是编译期检查,运行时也有硬件保护。
ch04 这一章四类数据归位,每一类对应一个段:
| 数据类型 | 例子 | 落地段 |
|---|---|---|
auto(栈上局部变量) | int i = 0;(函数内) | stack |
| 已初始化全局 / static | static int s_count = 5; | .data |
| 未初始化全局 / static | static struct led led_pool[8]; | .bss |
static const 常量 | static const uint8_t MAX = 100; | .rodata |
malloc / calloc | malloc(sizeof(struct led)); | heap |
后面的 4.7.7 节会贴一份 STM32H7 的真实内存地图,看每一个段在 SRAM 里物理地址是多少。
4.7.6 动态内存的工业级用法
很多老资料把“嵌入式 MCU 不用 malloc“当成铁律。这是 1990 年代裸机 8051 / 小 RAM MCU 时代留下的 dogma,不是现代嵌入式现实。
现实是这样的:
- FreeRTOS heap_4 / heap_5:相邻 free 块自动合并,碎片可控,工业产品标配
- RT-Thread
rt_malloc/ 内存池mp:长跑稳定,国内大量产品在用 - 状态机框架的事件池:预分配 + 动态借还,事件驱动框架的核心机制
- lwIP 协议栈:所有 pbuf 网络包都是动态分配
- FATFS、libgpiod、绝大多数中间件:默认都用动态内存
最新的安全标准也不再禁动态内存:
- MISRA C:2012 amendment 1 把动态内存从“禁用“放宽到“有约束允许“
- DO-178C 在有形式化生命周期分析时允许动态内存
- IEC 62304 Class B/C 安全关键软件可以用动态内存,前提是有合规的资源管理
工业纪律的关键不是“不用 malloc“,是生命周期管理。判定标准:
- 每个 alloc 有配对的 free 路径。函数中间任何
return都不能漏过 free - 异常退出走
goto cleanup。Linux 内核风格,几十年实践能压住所有 leak - 共享所有权用引用计数。Linux
kref_init / kref_get / kref_put是标准模板 - 选 RTOS 提供的 heap 而不是 newlib
dlmalloc。前者有合并机制 + 审计接口,后者反复分配释放后容易碎片放大 - 关键路径的 WCET 要测。
pvPortMalloc在 heap_4 上是 O(N)(N 是 free list 长度),实时任务里用对象池或者预分配避开
什么时候仍然优先用静态分配(直接静态实例 / 静态对象池)?
- 8051 / M0 + 16 KB RAM 这种小芯片:堆碎片 + 没有 RTOS heap,只能静态
- DO-178C Level A 飞行控制 / IEC 62304 Class C 终极严格场景:最稳是规避动态内存
- 中断热路径每秒几百万次 alloc 的极端情况:避开 heap 锁竞争
绝大多数现代嵌入式项目(Cortex-M4 以上 + RTOS)都是三种工具按场景混用:全局少量对象 → 直接静态实例;上限固定 + 频繁取还 → 静态对象池;生命周期不固定 → RTOS heap + goto cleanup。
动态内存不是危险品,缺乏生命周期纪律才是。AI 工具(Coverity / Codacy / Claude Code 这一类)现在能自动审计 alloc / free 的配对路径和异常退出分支,工程上比手工 review 可靠得多。
4.7.7 STM32H7 内存地图举例
抽象的 .text / .rodata / .data / .bss / heap / stack 在真实 MCU 上是哪几片物理 SRAM?
以 STM32H7 系列(Cortex-M7,是工业控制板常用的代核)为例。这颗芯片的内存布局:
0x0800 0000 - 0x081F FFFF 2 MB Flash (.text, .rodata, .data 初值)
0x2000 0000 - 0x2001 FFFF 128KB DTCM (Cortex-M7 紧耦合数据·CubeMX 默认 stack 在这)
0x2400 0000 - 0x2407 FFFF 512KB AXI SRAM (主 RAM, .bss / .data / heap)
0x3000 0000 - 0x3004 FFFF 288KB SRAM1-3 (DMA / 外设缓冲常用)
0x3800 0000 - 0x3800 FFFF 64KB SRAM4 (低功耗域)
0x4000 0000 - 0x4FFF FFFF APB / AHB 外设寄存器(GPIO / UART / SPI ...)
0x5800 2000 - 0x5800 25FF GPIOA-K 寄存器组(包括 ch01 1.7.6 提的 BSRR)
0xE000 0000 - 0xE00F FFFF Cortex-M7 内核私有外设(SysTick / NVIC / SCB)
链接脚本(.ld 文件)告诉 ld:
.text起点0x0800 0000(Flash),程序从这里开始执行.bss / .data / heap在0x2400 0000(AXI SRAM),主 RAM 区stack在0x2000 0000(DTCM)顶部往下增长。DTCM 是 Cortex-M7 紧耦合数据 RAM,跟 CPU 直连,访问最快,CubeMX 生成的 .ld 默认把 stack 放这里- 上电后 startup 代码把
.data段从 Flash copy 到 SRAM(初值),把.bss段清零
static struct led led_pool[8] 在编译期已经知道 size。链接器在 .bss 里给它分配一段地址,比如 0x2400 0080 - 0x2400 00C0(假设每个 led 8 字节)。运行时这块地址就是池子的物理位置,整个固件生命周期不变。
PC 模拟版跑同一份代码,地址换成 Linux 进程的虚拟地址(如 0x55B5 1234 0080),但段的概念一样:.text / .rodata / .data / .bss 都在那里,只是物理位置由操作系统的进程虚拟内存管理决定。
这个地图教给你的事:MCU 上你写下的每一个变量,都有确切的物理位置。static / static const / 函数内栈变量决定了它落在 SRAM 的哪一段。当你能在脑里画出这张地图,下次有人说“这个项目跑久了 RAM 涨了“,你就知道往 .bss 大数组、heap leak、stack 深度三个方向查。
4.7.8 全局指针句柄是合理用法吗
是。
要分清楚两种“全局“:
裸数据型全局变量:例如 int g_temp_value;、char g_buffer[64];、int g_status;。这种要避免。任何模块都能直接读写,谁改了谁没改追不到,并发场景下竞态拉满。这是 ch01-ch03 一直在反对的“敞开的挂号单“。
接口型全局指针句柄:例如 extern struct led_base *green_led;、extern struct uart *console;、extern struct rtc_dev *system_rtc;。这种是合理的。指针指向的对象 static 分配在驱动的 .c 文件里(同 ch01 1.10.1 节的指针句柄持有),应用层通过 led_on(green_led) 这种封装函数操作它,按工业纪律不直接读写字段。这是把一个单例对象用指针句柄暴露给应用层,不是裸数据共享。
工业代码里 extern xxx_base_t *xxx_dev; 这种声明是大量存在的,每个外设设备实例(LED、按键、UART、RTC、温度传感器)通常都对应一两个全局句柄。这就是“设备树思路“在 C 里的落地:全局可见的设备名 + 应用层不直接访问字段的设备实例。第 19 章工业实战会展开。
另一种合理的全局是 initcall 段(第 17 章详讲):一组函数指针放在 .bss 的特殊段里,启动时按顺序调用。这不是数据共享,是机制实现。
需要警惕的两个使用方式:
- 全局指针句柄之间的互相依赖:A 模块的初始化引用了 B 模块的句柄,但 B 还没 init。这是 ch17 initcall 7 级排序要解决的问题。
- 应用层通过句柄访问对象字段:写
green_led->pin = 5和写g_temp = 100一样,code review 看到就要打回。应用层只走led_on / led_off这种封装接口,不直接读写驱动 struct 的字段。
4.8 你现在的代码在 STM32 上长什么样
PC 模拟版是 printf 假装操作 GPIO。STM32 真实硬件上长这样(节选自 oop-in-c/code/04-data-classification/platform-mcu/stm32/led_stm32.c,pin 仍是 PIN_NUM('A', 13) 编码,详见第 1 章 § 1.x PIN_NUM 编码):
#include "platform.h"
#include "stm32f4xx_hal.h"
void platform_gpio_init(uint8_t pin, uint8_t mode)
{
GPIO_InitTypeDef cfg = {0};
_enable_port_clock(pin);
cfg.Pin = PIN_MASK(pin);
cfg.Mode = (mode == GPIO_MODE_OUTPUT) ?
GPIO_MODE_OUTPUT_PP : GPIO_MODE_INPUT;
cfg.Pull = GPIO_NOPULL;
cfg.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(PIN_PORT(pin), &cfg);
}
void platform_gpio_write(uint8_t pin, bool value)
{
HAL_GPIO_WritePin(PIN_PORT(pin), PIN_MASK(pin),
value ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
led.h / led.c / main.c 一字不改。static struct led led_pool[8] 落到 STM32 的 .bss 段,启动时清零,运行期池子大小固定。这里用对象池是 4.5 节解释过的演示选择,LED 这种数量固定的全局对象用直接静态实例(4.7.2 节写法 A)也很常见,工业级代码两种都用。
这一节用的是函数式包装的 platform 抽象,是教学简化版。真正工业级用虚函数表(ops 表),允许 runtime 切换平台。第 16 章会把 platform 层从函数式升级成 ops 表式(gpio_chip 子系统)。
4.9 工业代码里的数据归位长什么样
我做的工业控制板项目里,数据归位是一个跨模块的纪律。每个驱动 .c 文件开头都遵循同一套结构:
/* drivers/eeprom/ds2433.c · 简化结构 */
/* 1. 只读常量 */
static const uint32_t DS2433_MAX_ADDR = 4096;
/* 2. 模块共享数据 (按需选静态实例 / 对象池 / 动态分配, 这一份用静态实例) */
static unsigned int s_init_count;
static int s_debug_flag;
/* 3. file-private 工具函数 */
static int ds2433_send_cmd(struct ds2433 *me, uint8_t cmd);
static int ds2433_wait_ready(struct ds2433 *me);
50 个驱动文件全是这个结构。新人接手任何一个文件,前几行就看到“这个模块的数据归位是什么样“。
DS2433 这种跟单总线挂的 EEPROM 通常每板只有 1-2 颗,直接静态实例就够:
/* drivers/eeprom/ds2433_cfg.c · 板级实例 */
static struct ds2433 ds2433_main;
struct ds2433 *ds2433_top = &ds2433_main; /* 应用层句柄 */
数量上限固定 + 频繁创建销毁的对象(任务句柄、连接池槽)才走静态对象池。生命周期不固定的对象(动态接收的总线消息、按需创建的会话、状态机事件)走 RTOS 提供的动态内存(FreeRTOS pvPortMalloc、RT-Thread rt_malloc、状态机框架的事件分配接口)。三种持有方式按对象生命周期选,不是“先静态再说“。
跨文件的全局变量极少。所有跨文件共享的“对象“(green_led、temp_sensor_top、fan_main)都是通过 extern struct xxx_base *xxx; 这种接口指针暴露,背后的 struct 字段还是关在 .c 里。
这种纪律不是为了“代码好看“。是为了:
- 跨年的代码维护期,谁都能 5 分钟读懂某个变量的归属
- 静态分析工具(PCLint / Coverity / Claude Code 这一类 AI 审计)能确定每个变量的访问边界
- 单元测试时每个模块的状态边界明确,能 mock 干净
- 跨模块 bug 锁定时,全局污染面小
这就是工业级 C 代码的骨架。第 5 章会打开 STM32 HAL 库源码,看看 ST 工程师怎么遵守同一套规则。
4.10 跑一遍
cd oop-in-c/code/04-data-classification/pc
make
./demo
输出节选:
========================================
Part 1: BAD code with global g_pin
========================================
--- bad_led_init for red (pin=5) ---
[BAD_LED] Pin5 initialized (g_pin=5, init #1)
g_pin = 5 (correct)
--- bad_led_init for green (pin=3) ---
[BAD_LED] Pin3 initialized (g_pin=3, init #2)
g_pin = 3 (overwritten by second init)
--- Try to turn ON "red" ---
[BAD_LED] Pin3 ON
But the actual pin is 3 (green's pin), not 5.
[BUG] g_pin is shared, two LEDs can't coexist.
========================================
Part 2: GOOD code with struct + static pool
========================================
--- led_acquire for red (pin=5) ---
[LED] Pin5 acquired (slot 0, total inits 1)
--- led_acquire for green (pin=3) ---
[LED] Pin3 acquired (slot 1, total inits 2)
--- Both LEDs are independent ---
red: is_on=true brightness=80%
green: is_on=true brightness=40%
--- Module-level data via function ---
led_get_init_count() = 2 (no extern, no global var)
--- Pool exhaustion (acquire 8 then 9th fails) ---
[LED] Pin10 acquired (slot 2, total inits 3)
...
[LED] Pin15 acquired (slot 7, total inits 8)
[LED] Error: pool exhausted (size=8)
9th acquire returned 00000000 (NULL = pool exhausted, expected)
Part 1 重现了全局变量的 bug:第二次 init 覆盖第一次,“红灯“操作的实际是绿灯的引脚。
Part 2 演示数据归位完成形态:每个 LED 有自己的 pin / brightness,通过 led_get_init_count() 函数访问模块级数据,对象池满了 acquire 返回 NULL。
4.11 视频回放
想听口播版的可以看 B 站这一期视频:
视频里讲了白板类比(全局变量被路过的人擦掉)、部门文件夹类比(static 文件私有),节奏更紧凑。书里补了视频没讲透的 6 个细节(4.7 节)和工业代码的对照(4.9 节)。
封装篇到这里:第 1 章 struct + me、第 2 章 static + /* private */ 纪律、第 3 章前缀 + init/deinit、第 4 章数据三级归位(实例 / 模块 / 常量)。所有零件凑齐了。
下一章
但我说了不算。下一章打开 STM32 HAL 库的源码,看看 ST 工程师在做同样的事。HAL_GPIO_Init、HAL_GPIO_WritePin、GPIOA / GPIOB / GPIOC,几千个 HAL 函数就一个套路。